Czym jest ij k w wektorach. Wektory jednostkowe. Orty. Kartezjański układ współrzędnych
Nareszcie trafiłem w swoje ręce ten obszerny i długo oczekiwany temat. geometria analityczna. Na początek trochę o tym dziale matematyki wyższej... Na pewno pamiętasz teraz szkolny kurs geometrii z licznymi twierdzeniami, ich dowodami, rysunkami itp. Co ukryć, temat niekochany i często niejasny dla znacznej części uczniów. Co dziwne, geometria analityczna może wydawać się bardziej interesująca i przystępna. Co oznacza przymiotnik „analityczny”? Od razu przychodzą mi na myśl dwa banalne wyrażenia matematyczne: „metoda rozwiązania graficznego” i „ Metoda analityczna rozwiązania". Metoda graficzna wiąże się oczywiście z konstruowaniem wykresów i rysunków. Analityczny Lub metoda polega na rozwiązywaniu problemów głównie poprzez operacje algebraiczne. Pod tym względem algorytm rozwiązywania prawie wszystkich problemów geometrii analitycznej jest prosty i przejrzysty; często wystarczy dokładnie zastosować niezbędne formuły - i odpowiedź jest gotowa! Nie, oczywiście, bez rysunków w ogóle się nie obejdziemy, a poza tym dla lepszego zrozumienia materiału postaram się je zacytować bez konieczności.
Nowo otwarty kurs lekcji geometrii nie pretenduje do ukończenia teoretycznie, lecz jest nastawiony na rozwiązywanie problemów praktycznych. W moich wykładach będę uwzględniać tylko to, co z mojego punktu widzenia jest istotne z praktycznego punktu widzenia. Jeśli potrzebujesz pełniejszej pomocy w którymkolwiek podrozdziale, polecam następującą, dość przystępną literaturę:
1) Rzecz, którą bez wątpienia zna kilka pokoleń: Podręcznik szkolny do geometrii, autorzy - L.S. Atanasjan i Spółka. Ten wieszak do szatni szkolnej doczekał się już 20 (!) przedruków, co oczywiście nie jest limitem.
2) Geometria w 2 tomach. Autorski L.S. Atanasjan, Bazylew V.T.. To literatura dla liceum, będzie ci potrzebna pierwszy tom. Rzadko spotykane zadania mogą wypaść mi z oczu i instruktaż udzieli nieocenionej pomocy.
Obie książki można pobrać bezpłatnie online. Ponadto możesz korzystać z mojego archiwum z gotowe rozwiązania, które można znaleźć na stronie Pobierz przykłady z matematyki wyższej.
Wśród narzędzi ponownie proponuję własny rozwój - pakiet oprogramowania w geometrii analitycznej, co znacznie ułatwi życie i zaoszczędzi mnóstwo czasu.
Zakłada się, że czytelnik zna podstawowe pojęcia i figury geometryczne: punkt, linia, płaszczyzna, trójkąt, równoległobok, równoległościan, sześcian itp. Wskazane jest zapamiętanie niektórych twierdzeń, przynajmniej twierdzenia Pitagorasa, witam powtarzaczy)
A teraz rozważymy kolejno: koncepcję wektora, działania z wektorami, współrzędne wektora. Polecam czytać dalej najważniejszy artykuł Iloczyn skalarny wektorów, i również Iloczyn wektorowy i mieszany wektorów. Nie będzie też zbędne zadanie lokalne – podział segmentu pod tym względem. Na podstawie powyższych informacji możesz opanować równanie prostej w płaszczyźnie Z najprostsze przykłady rozwiązań, co pozwoli nauczyć się rozwiązywać problemy z geometrii. Przydatne są również następujące artykuły: Równanie płaszczyzny w przestrzeni, Równania prostej w przestrzeni, Podstawowe zagadnienia na prostej i płaszczyźnie, inne działy geometrii analitycznej. Oczywiście po drodze uwzględnione zostaną standardowe zadania.
Koncepcja wektora. Wolny wektor
Na początek powtórzmy szkolną definicję wektora. Wektor zwany skierowany odcinek, dla którego wskazany jest jego początek i koniec:
W tym przypadku początkiem odcinka jest punkt, a końcem odcinka jest punkt. Sam wektor jest oznaczony przez . Kierunek jest istotne, jeśli przesuniesz strzałkę na drugi koniec segmentu, otrzymasz wektor i to już jest zupełnie inny wektor. Pojęcie wektora wygodnie utożsamia się z ruchem ciało fizyczne: Zgadzam się, wejście do drzwi instytutu i opuszczenie drzwi instytutu to zupełnie różne rzeczy.
Wygodnie jest rozpatrywać poszczególne punkty płaszczyzny lub przestrzeni jako tzw wektor zerowy. Dla takiego wektora koniec i początek pokrywają się.
!!! Notatka: Tu i dalej można założyć, że wektory leżą w tej samej płaszczyźnie lub można założyć, że znajdują się w przestrzeni – istota prezentowanego materiału dotyczy zarówno płaszczyzny, jak i przestrzeni.
Oznaczenia: Wielu od razu zauważyło kij bez strzałki w oznaczeniu i stwierdziło, że na górze jest też strzałka! Co prawda można to napisać strzałką: , ale jest to również możliwe wpis, z którego skorzystam w przyszłości. Dlaczego? Najwyraźniej ten nawyk rozwinął się ze względów praktycznych; moi strzelcy w szkole i na uniwersytecie okazali się zbyt różnych rozmiarów i kudłaci. W literatura edukacyjna czasami w ogóle nie zawracają sobie głowy pismem klinowym, ale podkreślają pogrubione litery: , sugerując w ten sposób, że jest to wektor.
To była stylistyka, a teraz o sposobach pisania wektorów:
1) Wektory można pisać dwiema dużymi literami łacińskimi: ![]() i tak dalej. W tym przypadku pierwsza litera Koniecznie oznacza punkt początkowy wektora, a druga litera oznacza punkt końcowy wektora.
i tak dalej. W tym przypadku pierwsza litera Koniecznie oznacza punkt początkowy wektora, a druga litera oznacza punkt końcowy wektora.
2) Wektory są również pisane małymi literami łacińskimi:
W szczególności nasz wektor można dla skrócenia zmienić na małą literę łacińską.
Długość Lub moduł niezerowy wektor nazywany jest długością odcinka. Długość wektora zerowego wynosi zero. Logiczny.
Długość wektora jest oznaczona znakiem modułu: ,
Jak znaleźć długość wektora (lub powtórzymy to, w zależności od kogo) nauczymy się nieco później.
Była to podstawowa wiedza o wektorach, znana wszystkim uczniom. W geometrii analitycznej tzw wolny wektor.
Mówiąc najprościej - wektor można wykreślić z dowolnego punktu:
Przyzwyczailiśmy się nazywać takie wektory równymi (definicja wektorów równych zostanie podana poniżej), ale z czysto matematycznego punktu widzenia są to SAME WEKTORY lub wolny wektor. Dlaczego za darmo? Ponieważ w trakcie rozwiązywania problemów możesz „dołączyć” ten lub inny wektor do DOWOLNEGO punktu płaszczyzny lub przestrzeni, której potrzebujesz. To bardzo fajna funkcja! Wyobraźmy sobie wektor o dowolnej długości i kierunku – można go „klonować” nieskończoną ilość razy i w dowolnym punkcie przestrzeni, tak naprawdę istnieje WSZĘDZIE. Jest taki student, który mówi: wektor ma w dupie każdego wykładowcę. W końcu to nie tylko dowcipny rym, wszystko jest matematycznie poprawne - tam też można dołączyć wektor. Ale nie spiesz się z radością, to sami uczniowie często cierpią =)
Więc, wolny wektor- Ten pęczek identyczne skierowane segmenty. Podana na początku akapitu szkolna definicja wektora: „Odcinek skierowany nazywa się wektorem...” implikuje konkretny skierowany segment pobrany z danego zbioru, który jest powiązany z określonym punktem na płaszczyźnie lub przestrzeni.
Należy zauważyć, że z punktu widzenia fizyki koncepcja wektora swobodnego jest generalnie błędna, a punkt zastosowania wektora ma znaczenie. Rzeczywiście, bezpośrednie uderzenie o tej samej sile w nos lub czoło, wystarczające do rozwinięcia mojego głupiego przykładu, pociąga za sobą różne konsekwencje. Jednakże, niewolny wektory można znaleźć również w trakcie vyshmat (nie idź tam :)).
Działania z wektorami. Kolinearność wektorów
W kurs szkolny geometrii, uwzględnia się szereg działań i reguł z wektorami: dodawanie według reguły trójkąta, dodawanie według reguły równoległoboku, zasada różnicy wektorów, mnożenie wektora przez liczbę, iloczyn skalarny wektorów itp. Na początek powtórzmy dwie zasady, które są szczególnie istotne przy rozwiązywaniu problemów geometrii analitycznej.
Zasada dodawania wektorów za pomocą reguły trójkąta
Rozważmy dwa dowolne niezerowe wektory i: 
Musisz znaleźć sumę tych wektorów. Ze względu na to, że wszystkie wektory są uważane za wolne, odłożymy wektor z koniec wektor: 
Suma wektorów to wektor. Dla lepszego zrozumienia reguły wskazane jest uwzględnienie znaczenie fizyczne: niech jakieś ciało porusza się wzdłuż wektora, a potem wzdłuż wektora. Wówczas suma wektorów jest wektorem powstałej ścieżki, której początek znajduje się w punkcie wyjścia, a koniec w punkcie dotarcia. Podobną regułę formułuje się dla sumy dowolnej liczby wektorów. Jak mówią, ciało może iść swoją drogą bardzo pochylając się po zygzaku, a może na autopilocie - wzdłuż wynikowego wektora sumy.
Nawiasem mówiąc, jeśli wektor zostanie przełożony Rozpoczęty wektor, wtedy otrzymujemy odpowiednik reguła równoległoboku dodawanie wektorów.
Najpierw o kolinearności wektorów. Nazywa się te dwa wektory współliniowy, jeśli leżą na tej samej linii lub na liniach równoległych. Z grubsza mówimy o wektorach równoległych. Ale w odniesieniu do nich zawsze używany jest przymiotnik „współliniowy”.
Wyobraź sobie dwa współliniowe wektory. Jeżeli strzałki tych wektorów są skierowane w tym samym kierunku, wówczas nazywane są takie wektory współreżyserowany. Jeśli strzałki wskazują w kierunku różne strony, to wektory będą przeciwne kierunki.
Oznaczenia: kolinearność wektorów jest zapisywana za pomocą zwykłego symbolu równoległości: , natomiast możliwe jest uszczegółowienie: (wektory są współkierunkowane) lub (wektory są skierowane przeciwnie).
Praca niezerowy wektor na liczbie to wektor, którego długość jest równa , a wektory i są współskierowane i przeciwnie skierowane na .
Zasadę mnożenia wektora przez liczbę łatwiej zrozumieć za pomocą obrazu: 
Przyjrzyjmy się temu bardziej szczegółowo:
1) Kierunek. Jeśli mnożnik jest ujemny, to wektor zmienia kierunek odwrotnie.
2) Długość. Jeśli mnożnik zawiera się w lub , to długość wektora maleje. Zatem długość wektora jest połową długości wektora. Jeśli moduł mnożnika jest większy niż jeden, to długość wektora wzrasta w samą porę.
3) Proszę o tym pamiętać wszystkie wektory są współliniowe, podczas gdy jeden wektor jest wyrażany przez inny, na przykład . Odwrotna sytuacja jest również prawdą: jeśli jeden wektor można wyrazić przez inny, to wektory takie są z konieczności współliniowe. Zatem: jeśli pomnożymy wektor przez liczbę, otrzymamy współliniowość(w stosunku do oryginału) wektor.
4) Wektory są współkierowane. Vectors i są również współreżyserowane. Każdy wektor z pierwszej grupy jest skierowany przeciwnie do dowolnego wektora z drugiej grupy.
Które wektory są równe?
Dwa wektory są równe, jeśli mają ten sam kierunek i tę samą długość. Należy zauważyć, że współkierunkowość implikuje współliniowość wektorów. Definicja byłaby niedokładna (zbędna), gdybyśmy powiedzieli: „Dwa wektory są równe, jeśli są współliniowe, współkierunkowe i mają tę samą długość”.
Z punktu widzenia koncepcji wektora swobodnego, równe wektory– to ten sam wektor, który był już omawiany w poprzednim akapicie.
Współrzędne wektorowe na płaszczyźnie i w przestrzeni
Pierwszą kwestią jest rozważenie wektorów na płaszczyźnie. Przedstawmy kartezjański prostokątny układ współrzędnych i wykreślmy go od początku współrzędnych pojedynczy wektory i:

Wektory i prostokątny. Ortogonalny = Prostopadły. Radzę powoli przyzwyczajać się do terminów: zamiast równoległości i prostopadłości używamy odpowiednio tych słów kolinearność I ortogonalność.
Przeznaczenie: Ortogonalność wektorów jest zapisywana za pomocą zwykłego symbolu prostopadłości, na przykład: .
Rozważane wektory nazywane są wektory współrzędnych Lub orty. Powstają te wektory podstawa na powierzchni. Myślę, że to, czym jest podstawa, jest intuicyjnie jasne dla wielu, a nawet większej liczby osób dokładna informacja można znaleźć w artykule Liniowa (nie)zależność wektorów. Baza wektorów Krótko mówiąc, podstawa i pochodzenie współrzędnych określa cały układ - jest to rodzaj fundamentu, na którym gotuje się pełne i bogate życie geometryczne.
Czasami nazywana jest skonstruowana podstawa ortonormalny podstawa płaszczyzny: „orto” - ponieważ wektory współrzędnych są ortogonalne, przymiotnik „znormalizowany” oznacza jednostkę, tj. długości wektorów bazowych są równe jeden.
Przeznaczenie: podstawa jest zwykle zapisana w nawiasach, wewnątrz których w ścisłej kolejności wektory bazowe są wymienione, na przykład: . Współrzędne wektorów to jest zabronione przemieniać.
Każdy wektor samolotu jedyny sposób wyrażony jako: ![]() , Gdzie - liczby które nazywają się współrzędne wektora na tej podstawie. I samo wyrażenie
, Gdzie - liczby które nazywają się współrzędne wektora na tej podstawie. I samo wyrażenie ![]() zwany rozkład wektorowywedług podstawy .
zwany rozkład wektorowywedług podstawy .
Kolacja serwowana:

Zacznijmy od pierwszej litery alfabetu: . Rysunek wyraźnie pokazuje, że przy dekompozycji wektora na bazę wykorzystuje się te, które właśnie omówiliśmy:
1) zasada mnożenia wektora przez liczbę: i ;
2) dodawanie wektorów zgodnie z zasadą trójkąta: .
Teraz wykreśl w myślach wektor z dowolnego innego punktu na płaszczyźnie. Jest całkiem oczywiste, że jego upadek „będzie za nim nieustannie podążał”. Oto swoboda wektora - wektor „nosi wszystko ze sobą”. Własność ta jest oczywiście prawdziwa dla dowolnego wektora. Zabawne, że same wektory bazowe (swobodne) nie muszą być wykreślane od początku układu współrzędnych; jeden można narysować na przykład w lewym dolnym rogu, a drugi w prawym górnym rogu i nic się nie zmieni! To prawda, że \u200b\u200bnie musisz tego robić, ponieważ nauczyciel również wykaże się oryginalnością i wyciągnie „zaliczenie” w nieoczekiwanym miejscu.
Wektory ilustrują dokładnie zasadę mnożenia wektora przez liczbę, wektor jest współkierunkowy z wektorem bazowym, wektor jest skierowany przeciwnie do wektora bazowego. Dla tych wektorów jedna ze współrzędnych jest równa zeru; można to skrupulatnie zapisać w następujący sposób:
Nawiasem mówiąc, wektory bazowe są takie: (w rzeczywistości są wyrażane przez siebie).
I w końcu: , . Swoją drogą, czym jest odejmowanie wektorów i dlaczego nie wspomniałem o zasadzie odejmowania? Gdzieś w algebrze liniowej, nie pamiętam gdzie, zauważyłem, że jest odejmowanie szczególny przypadek dodatek. Zatem rozwinięcia wektorów „de” i „e” można łatwo zapisać jako sumę: , ![]() . Zmień układ wyrazów i zobacz na rysunku, jak dobrze sprawdza się w takich sytuacjach stare, dobre dodawanie wektorów zgodnie z zasadą trójkąta.
. Zmień układ wyrazów i zobacz na rysunku, jak dobrze sprawdza się w takich sytuacjach stare, dobre dodawanie wektorów zgodnie z zasadą trójkąta.
Rozważany rozkład formy ![]() czasami nazywany rozkładem wektorowym w systemie ort(tj. w układzie wektorów jednostkowych). Ale nie jest to jedyny sposób napisania wektora, powszechna jest następująca opcja:
czasami nazywany rozkładem wektorowym w systemie ort(tj. w układzie wektorów jednostkowych). Ale nie jest to jedyny sposób napisania wektora, powszechna jest następująca opcja:
Lub ze znakiem równości:
Same wektory bazowe są zapisane w następujący sposób: i
Oznacza to, że współrzędne wektora podano w nawiasach. W problemach praktycznych stosuje się wszystkie trzy opcje notacji.
Wątpiłem czy się odezwać, ale i tak to powiem: współrzędnych wektorowych nie można zmieniać. Ściśle na pierwszym miejscu zapisz odpowiadającą współrzędną wektor jednostkowy , ściśle na drugim miejscu zapisujemy współrzędną odpowiadającą wektorowi jednostkowemu. Rzeczywiście, i są dwoma różnymi wektorami.
Ustaliliśmy współrzędne w samolocie. Przyjrzyjmy się teraz wektorom w przestrzeni trójwymiarowej, tutaj prawie wszystko jest takie samo! Po prostu doda jeszcze jedną współrzędną. Trudno jest wykonać rysunki trójwymiarowe, więc ograniczę się do jednego wektora, który dla uproszczenia odłożę na bok od początku: 
Każdy Wektor kosmiczny 3D jedyny sposób
rozwinąć w oparciu o bazę ortonormalną: ![]() , gdzie są współrzędne wektora (liczby) w tej podstawie.
, gdzie są współrzędne wektora (liczby) w tej podstawie.
Przykład z obrazka: ![]() . Zobaczmy, jak działają tutaj reguły wektorów. Najpierw pomnóż wektor przez liczbę: (czerwona strzałka), (zielona strzałka) i (malinowa strzałka). Po drugie, oto przykład dodania kilku, w tym przypadku trzech, wektorów: . Wektor sumy zaczyna się w początkowym punkcie wyjścia (początku wektora) i kończy w końcowym punkcie przybycia (końcu wektora).
. Zobaczmy, jak działają tutaj reguły wektorów. Najpierw pomnóż wektor przez liczbę: (czerwona strzałka), (zielona strzałka) i (malinowa strzałka). Po drugie, oto przykład dodania kilku, w tym przypadku trzech, wektorów: . Wektor sumy zaczyna się w początkowym punkcie wyjścia (początku wektora) i kończy w końcowym punkcie przybycia (końcu wektora).
Wszystkie wektory przestrzeni trójwymiarowej są oczywiście również wolne; spróbuj mentalnie odsunąć wektor od dowolnego innego punktu, a zrozumiesz, że jego rozkład „pozostanie z nim”.
Podobny do płaskiego etui, oprócz pisania ![]() powszechnie stosowane są wersje z nawiasami: albo .
powszechnie stosowane są wersje z nawiasami: albo .
Jeśli w rozwinięciu brakuje jednego (lub dwóch) wektorów współrzędnych, w ich miejsce wstawiane są zera. Przykłady:
wektor (starannie ![]() ) - napiszmy ;
) - napiszmy ;
wektor (starannie ![]() ) - napiszmy ;
) - napiszmy ;
wektor (starannie ![]() ) - napiszmy .
) - napiszmy .
Wektory bazowe zapisuje się w następujący sposób:
Być może jest to cała minimalna wiedza teoretyczna niezbędna do rozwiązywania problemów geometrii analitycznej. Terminów i definicji może być wiele, dlatego radzę manekinom ponownie przeczytać i zrozumieć ta informacja Ponownie. Każdemu czytelnikowi przyda się od czasu do czasu odwołanie się do podstawowej lekcji, aby lepiej przyswoić sobie materiał. Kolinearność, ortogonalność, baza ortonormalna, rozkład wektorów – te i inne pojęcia będą często stosowane w przyszłości. Chciałbym zauważyć, że materiały witryny nie wystarczą, aby zdać egzamin teoretyczny lub kolokwium z geometrii, ponieważ starannie szyfruję wszystkie twierdzenia (i bez dowodów) - ze szkodą dla styl naukowy prezentacji, ale plus dla zrozumienia tematu. Aby otrzymać szczegółowe informacje teoretyczne, prosimy o ukłon w stronę profesora Atanasyana.
I przechodzimy do części praktycznej:
Najprostsze problemy geometrii analitycznej.
Działania z wektorami we współrzędnych
Zdecydowanie wskazane jest nauczenie się rozwiązywania zadań, które będą rozpatrywane w pełni automatycznie, oraz formuł zapamiętać, nie musisz nawet specjalnie o tym pamiętać, oni sami to zapamiętają =) Jest to bardzo ważne, ponieważ inne problemy geometrii analitycznej opierają się na najprostszych elementarnych przykładach, a spędzanie dodatkowego czasu na jedzeniu pionków będzie denerwujące . Nie ma potrzeby zapinania górnych guzików w koszuli; wiele rzeczy znasz ze szkoły.
Prezentacja materiału będzie przebiegać równolegle – zarówno w płaszczyźnie, jak i przestrzeni. Z tego powodu, że wszystkie formuły... przekonasz się sam.
Jak znaleźć wektor z dwóch punktów?
Jeżeli dane są dwa punkty płaszczyzny i, to wektor ma następujące współrzędne: ![]()
Jeżeli dane są dwa punkty w przestrzeni i, to wektor ma następujące współrzędne:
To jest, ze współrzędnych końca wektora musisz odjąć odpowiednie współrzędne początek wektora.
Ćwiczenia: Dla tych samych punktów zapisz wzory na znalezienie współrzędnych wektora. Wzory na końcu lekcji.
Przykład 1
Biorąc pod uwagę dwa punkty płaszczyzny i . Znajdź współrzędne wektora
Rozwiązanie: według odpowiedniego wzoru:
Alternatywnie można zastosować następujący wpis:
Estetycy zadecydują o tym:
Osobiście jestem przyzwyczajony do pierwszej wersji nagrania.
Odpowiedź:
Zgodnie z warunkiem nie było potrzeby konstruowania rysunku (co jest typowe dla problemów geometrii analitycznej), ale aby wyjaśnić manekinom niektóre punkty, nie będę leniwy: 
Zdecydowanie musisz zrozumieć różnica między współrzędnymi punktu i współrzędnymi wektorowymi:
Współrzędne punktu– są to współrzędne zwyczajne w prostokątnym układzie współrzędnych. Postaw punkty płaszczyzna współrzędnych Myślę, że każdy może to zrobić od klasy 5-6. Każdy punkt ma ściśle określone miejsce na płaszczyźnie i nie można go nigdzie przenieść.
Współrzędne wektora jest w tym przypadku jego rozwinięciem pod względem bazy. Dowolny wektor jest dowolny, więc w razie potrzeby możemy go łatwo odsunąć od innego punktu płaszczyzny. Co ciekawe, w przypadku wektorów nie trzeba w ogóle budować osi ani prostokątnego układu współrzędnych, wystarczy baza, w tym przypadku ortonormalna podstawa płaszczyzny.
Zapisy współrzędnych punktów i współrzędnych wektorów wydają się być podobne: , i znaczenie współrzędnych absolutnie różny i powinieneś być świadomy tej różnicy. Ta różnica dotyczy oczywiście także przestrzeni.
Szanowni Państwo, zapełnijmy ręce:
Przykład 2
a) Punkty i są przyznawane. Znajdź wektory i .
b) Przyznawane są punkty ![]() I . Znajdź wektory i .
I . Znajdź wektory i .
c) Punkty i są przyznawane. Znajdź wektory i .
d) Przyznawane są punkty. Znajdź wektory ![]() .
.
Być może to wystarczy. To przykłady, o których możesz decydować samodzielnie, staraj się ich nie zaniedbywać, to się opłaci ;-). Nie ma potrzeby wykonywania rysunków. Rozwiązania i odpowiedzi na końcu lekcji.
Co jest ważne przy rozwiązywaniu problemów z geometrii analitycznej? Ważne jest, aby zachować DUŻĄ OSTROŻNOŚĆ, aby uniknąć mistrzowskiego błędu „dwa plus dwa równa się zero”. Od razu przepraszam, jeśli gdzieś popełniłem błąd =)
Jak znaleźć długość odcinka?
Długość, jak już wspomniano, jest oznaczona znakiem modułu.
Jeżeli dane są dwa punkty płaszczyzny i , to długość odcinka można obliczyć ze wzoru
Jeżeli dane są dwa punkty w przestrzeni i, to długość odcinka można obliczyć za pomocą wzoru
Notatka: Formuły pozostaną poprawne, jeśli zamienimy odpowiednie współrzędne: i , ale pierwsza opcja jest bardziej standardowa
Przykład 3
Rozwiązanie: według odpowiedniego wzoru:
Odpowiedź: ![]()
Dla jasności zrobię rysunek 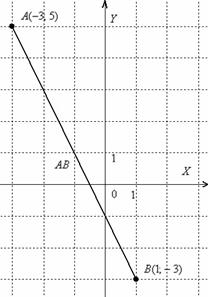
Odcinek - to nie jest wektor i oczywiście nie można go nigdzie przenieść. Dodatkowo, jeśli rysujesz w skali: 1 jednostka. = 1 cm (dwie komórki notesu), wówczas uzyskaną odpowiedź można sprawdzić zwykłą linijką, bezpośrednio mierząc długość odcinka.
Tak, rozwiązanie jest krótkie, ale jest w nim jeszcze kilka ważne punkty które chciałbym wyjaśnić:
Po pierwsze, w odpowiedzi podajemy wymiar: „jednostki”. Warunek nie mówi CO to jest, milimetry, centymetry, metry czy kilometry. Dlatego matematycznie poprawnym rozwiązaniem byłoby ogólne sformułowanie: „jednostki” - w skrócie „jednostki”.
Po drugie, powtórzmy materiał szkolny, który będzie przydatny nie tylko w rozważanym zadaniu:
Zwróć uwagę na ważna technika – usunięcie mnożnika spod pierwiastka. W wyniku obliczeń otrzymujemy wynik, a dobry styl matematyczny polega na usunięciu współczynnika spod pierwiastka (jeśli to możliwe). Bardziej szczegółowo proces wygląda następująco: ![]() . Oczywiście pozostawienie odpowiedzi bez zmian nie byłoby błędem - ale z pewnością byłoby mankamentem i poważnym argumentem za sprzeczeniem ze strony nauczyciela.
. Oczywiście pozostawienie odpowiedzi bez zmian nie byłoby błędem - ale z pewnością byłoby mankamentem i poważnym argumentem za sprzeczeniem ze strony nauczyciela.
Oto inne częste przypadki: 
Często jest ich wystarczająco dużo u nasady duża liczba, Na przykład . Co zrobić w takich przypadkach? Korzystając z kalkulatora sprawdzamy, czy liczba jest podzielna przez 4: . Tak, został całkowicie podzielony, a więc: ![]() . A może liczbę można ponownie podzielić przez 4? . Zatem:
. A może liczbę można ponownie podzielić przez 4? . Zatem: ![]() . Ostatnia cyfra liczby jest nieparzysta, więc dzielenie przez 4 po raz trzeci oczywiście nie będzie działać. Spróbujmy podzielić przez dziewięć: . W rezultacie:
. Ostatnia cyfra liczby jest nieparzysta, więc dzielenie przez 4 po raz trzeci oczywiście nie będzie działać. Spróbujmy podzielić przez dziewięć: . W rezultacie:
Gotowy.
Wniosek: jeśli pod pierwiastkiem otrzymamy liczbę, której nie da się wydobyć w całości, to staramy się usunąć czynnik spod pierwiastka - za pomocą kalkulatora sprawdzamy, czy liczba jest podzielna przez: 4, 9, 16, 25, 36, 49 itd.
Podczas decyzji różne zadania korzenie są powszechne, zawsze staraj się wyciągać czynniki spod pierwiastka, aby uniknąć niższej oceny i niepotrzebnych problemów z finalizacją rozwiązań w oparciu o uwagi nauczyciela.
Powtórzmy także pierwiastki kwadratowe i inne potęgi: 
Zasady działań ze stopniami w ogólna perspektywa można znaleźć w szkolnym podręczniku do algebry, ale myślę, że z podanych przykładów wszystko lub prawie wszystko jest już jasne.
Zadanie samodzielnego rozwiązania segmentu w przestrzeni:
Przykład 4
Punkty i są przyznawane. Znajdź długość odcinka.
Rozwiązanie i odpowiedź znajdują się na końcu lekcji.
Jak znaleźć długość wektora?
Jeśli podany jest wektor płaski, jego długość oblicza się ze wzoru.
Jeśli podany jest wektor przestrzenny, jego długość oblicza się ze wzoru ![]() .
.
Definicja Nazywa się uporządkowany zbiór (x 1 , x 2 , ... , x n) n liczb rzeczywistych wektor n-wymiarowy, i liczby x i (i = ) - składniki, Lub współrzędne,
Przykład. Jeżeli na przykład pewna fabryka samochodów musi wyprodukować na zmianę 50 samochodów osobowych, 100 ciężarówek, 10 autobusów, 50 zestawów części zamiennych do samochodów osobowych i 150 zestawów do samochodów ciężarowych i autobusów, to program produkcyjny tego zakładu można zapisać w postaci wektora (50, 100, 10, 50, 150), mający pięć składników.
Notacja. Wektory są oznaczone pogrubionymi małymi literami lub literami z kreską lub strzałką u góry, np. A Lub. Nazywa się te dwa wektory równy, jeśli mają tę samą liczbę składników i odpowiadające im składniki są równe.
Komponentów wektorowych nie można zamieniać, na przykład (3, 2, 5, 0, 1) oraz (2, 3, 5, 0, 1) różne wektory.
Operacje na wektorach. Praca
X= (x 1 , x 2 , ... ,x n) przez liczbę rzeczywistąλ zwany wektoremλ X= (λ x 1, λ x 2, ..., λ x n).
KwotaX= (x 1 , x 2 , ... ,x n) i y= (y 1 , y 2 , ... ,y n) nazywa się wektorem x+y= (x 1 + y 1 , x 2 + y 2 , ... , x n + + y n).
Przestrzeń wektorowa. N -wymiarowa przestrzeń wektorowa R n definiuje się jako zbiór wszystkich n-wymiarowych wektorów, dla których określone są operacje mnożenia przez liczby rzeczywiste i dodawania.
Ilustracja ekonomiczna. Ekonomiczna ilustracja n-wymiarowej przestrzeni wektorowej: przestrzeń towarów (dobra). Pod dobra będziemy rozumieć towar lub usługę, która trafia do sprzedaży w określonym czasie i w określonym miejscu. Załóżmy, że istnieje skończona liczba n dostępnych towarów; ilości każdego z nich zakupione przez konsumenta charakteryzują się zestawem towarów
X= (x 1 , x 2 , ..., x n),
gdzie x i oznacza ilość i-tego dobra zakupionego przez konsumenta. Założymy, że wszystkie dobra mają właściwość dowolnej podzielności, tak że można kupić dowolną nieujemną ilość każdego z nich. Wtedy wszystkie możliwe zbiory dóbr są wektorami przestrzeni dóbr C = ( X= (x 1 , x 2 , ... , x n) x ja ≥ 0, ja = ).
Niezależność liniowa.
System mi 1 , mi 2 , ... , mi nazywane są m wektorami n-wymiarowymi liniowo zależne, jeśli istnieją takie liczbyλ 1 , λ 2 , ... , λ m , z których co najmniej jeden jest niezerowy, tak że równośćλ 1 mi 1 + λ 2 mi 2 +... + λ m mi m = 0; w przeciwnym razie nazywa się ten układ wektorów liniowo niezależny, czyli wskazana równość jest możliwa tylko w przypadku, gdy wszyscy ![]() . Geometryczne znaczenie liniowej zależności wektorów w R 3, interpretowane jako segmenty skierowane, wyjaśniają następujące twierdzenia.
. Geometryczne znaczenie liniowej zależności wektorów w R 3, interpretowane jako segmenty skierowane, wyjaśniają następujące twierdzenia.
Twierdzenie 1. Układ składający się z jednego wektora jest liniowo zależny wtedy i tylko wtedy, gdy wektor ten wynosi zero.
Twierdzenie 2. Aby dwa wektory były liniowo zależne, konieczne i wystarczające jest, aby były one współliniowe (równoległe).
Twierdzenie 3 . Aby trzy wektory były liniowo zależne, konieczne i wystarczające jest, aby były współpłaszczyznowe (leżały w tej samej płaszczyźnie).
Lewa i prawa trójka wektorów. Trójka wektorów niewspółpłaszczyznowych a, b, c zwany Prawidłowy, jeśli obserwator z nich wspólne pochodzenie przechodząc przez końce wektorów a, b, c w podanej kolejności wydaje się następować zgodnie z ruchem wskazówek zegara. W przeciwnym razie a, b, c -zostawił trzy. Nazywa się wszystkie prawe (lub lewe) trójki wektorów ten sam zorientowany.
Podstawa i współrzędne. Trójka mi 1, mi 2 , mi 3 wektory niewspółpłaszczyznowe R 3 nazywa się podstawa i same wektory mi 1, mi 2 , mi 3 - podstawowy. Dowolny wektor A można jednoznacznie rozwinąć w wektory bazowe, to znaczy przedstawić w postaci
A= x 1 mi 1+x2 mi 2 + x 3 mi 3, (1.1)
nazywane są liczby x 1 , x 2 , x 3 w rozwinięciu (1.1). współrzędneA w podstawie mi 1, mi 2 , mi 3 i są oznaczone A(x 1, x 2, x 3).
Baza ortonormalna. Jeśli wektory mi 1, mi 2 , mi 3 są parami prostopadłe, a długość każdego z nich jest równa jeden, wówczas nazywa się podstawę ortonormalny, i współrzędne x 1 , x 2 , x 3 - prostokątny. Wektory bazowe bazy ortonormalnej będą oznaczone przez ja, j, k.
Założymy to w kosmosie R 3 wybrany został właściwy układ współrzędnych prostokątnych kartezjańskich (0, ja, j, k}.
Grafika wektorowa. Grafika wektorowa A do wektora B zwany wektorem C, który jest określony przez następujące trzy warunki:
1. Długość wektora C liczbowo równy obszarowi równoległoboku zbudowanego na wektorach A I B, tj.
C=
|a||b| grzech ( A^B).
2. Wektor C prostopadle do każdego z wektorów A I B.
3. Wektory A, B I C, wzięte we wskazanej kolejności, tworzą prawą trójkę.
Dla produktu krzyżowego C wprowadzono oznaczenie c =[ok] Lub
c = a
× B.
Jeśli wektory A I B są współliniowe, to grzech( a^b) = 0 i [ ok] = 0, w szczególności [ aa] = 0. Iloczyny wektorów jednostkowych: [ ja]=k, [jk] = I, [ki]=J.
Jeśli wektory A I B określone w podstawie ja, j, k współrzędne A(za 1, za 2, za 3), B(b 1, b 2, b 3), następnie

Praca mieszana. Jeśli iloczyn wektorowy dwóch wektorów A I B skalarnie pomnożona przez trzeci wektor C, wówczas nazywa się taki iloczyn trzech wektorów praca mieszana i jest oznaczony symbolem A pne.
Jeśli wektory a, b I C w podstawie ja, j, k podane przez ich współrzędne
A(za 1, za 2, za 3), B(b 1, b 2, b 3), C(ok. 1, ok. 2, ok. 3), następnie
 .
.
Iloczyn mieszany ma prostą interpretację geometryczną – jest to skalar wg całkowita wartość równa objętości równoległościanu zbudowanego na tych trzech wektorach.
Jeśli wektory tworzą prawą trójkę, to ich praca mieszana istnieje liczba dodatnia równa określonej objętości; jeśli to trójka a, b, c - w takim razie wyszedł a b c<0 и V = - a b c, zatem V =|a bc|.
Zakłada się, że współrzędne wektorów napotkanych w zadaniach pierwszego rozdziału są podane w odniesieniu do prawej bazy ortonormalnej. Wektor jednostkowy współkierunkowy z wektorem A, wskazany symbolem A O. Symbol R=OM oznaczony wektorem promienia punktu M, symbolami a, AB lub|a|, | AB|oznacza się moduły wektorów A I AB.
Przykład 1.2. Znajdź kąt między wektorami A= 2M+4N I B= m-n, Gdzie M I N- wektory jednostkowe i kąt pomiędzy M I N równa 120 o.
Rozwiązanie. Mamy: cos φ = ok/ab ab =(2M+4N) (m-n) = 2M 2 - 4N 2 +2mn=
= 2 - 4+2cos120 o = - 2 + 2(-0,5) = -3; a = ; A 2 = (2M+4N) (2M+4N) =
= 4M 2 +16mn+16N 2 = 4+16(-0,5)+16=12, co oznacza a = . b = ; B 2 =
= (m-n)(m-n) = M 2 -2mn+N 2 =
1-2(-0,5)+1 = 3, co oznacza b = . Wreszcie mamy: cosφ = = -1/2, φ = 120 o.
Przykład 1.3.Znajomość wektorów AB(-3, -2,6) i PNE.(-2,4,4),oblicz długość wysokości AD trójkąta ABC.
Rozwiązanie. Oznaczając obszar trójkąta ABC przez S, otrzymujemy:
S = 1/2 p.n.e. naszej ery. Następnie AD=2S/BC, BC== ![]() = 6,
= 6,
S = 1/2| AB×AC|.
AC=AB+BC, co oznacza wektor AC ma współrzędne
.
.
Przykład 1.4 . Podano dwa wektory A(11,10,2) i B(4,0,3). Znajdź wektor jednostkowy C, ortogonalne do wektorów A I B i skierowane tak, aby uporządkowana trójka wektorów a, b, c miał rację.
Rozwiązanie.Oznaczmy współrzędne wektora C w odniesieniu do danej prawej bazy ortonormalnej w postaci x, y, z.
Ponieważ C ⊥ a, c ⊥B, To ok= 0,cb= 0. Zgodnie z warunkami zadania wymagane jest, aby c = 1 i a b c >0.
Mamy układ równań dla znalezienie x, y, z: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
Z pierwszego i drugiego równania układu otrzymujemy z = -4/3 x, y = -5/6 x. Podstawiając y i z do trzeciego równania, mamy: x 2 = 36/125, skąd
x =±
. Używając warunku a b c > 0, otrzymujemy nierówność

Uwzględniając wyrażenia na z i y, wynikową nierówność zapisujemy w postaci: 625/6 x > 0, co oznacza, że x > 0. Zatem x = , y = - , z =- .
7.1. Definicja produktu krzyżowego
Trzy niewspółpłaszczyznowe wektory a, b i c, wzięte we wskazanej kolejności, tworzą prawoskrętną trójkę, jeśli od końca trzeciego wektora c widać, że najkrótszy zwrot od pierwszego wektora a do drugiego wektora b być w kierunku przeciwnym do ruchu wskazówek zegara, a trójka lewoskrętna, jeśli zgodnie z ruchem wskazówek zegara (patrz ryc. 16).
Iloczyn wektorowy wektora a i wektora b nazywa się wektorem c, który:
1. Prostopadle do wektorów a i b, tj. c ^ a i c ^ B ;
2. Ma długość równą liczbowo powierzchni równoległoboku zbudowanego na wektorach a iB jak po bokach (patrz rys. 17), tj.
3. Wektory a, b i c tworzą prawoskrętną trójkę.


Iloczyn krzyżowy jest oznaczony jako a x b lub [a, b]. Z definicji iloczynu wektorowego wynikają bezpośrednio następujące zależności pomiędzy wektorami jednostkowymi, J I k(patrz rys. 18):
ja x jot = k, jot x k = ja, k x ja = jot.
Udowodnijmy to na przykład ixj =k.
1) k ^ i, k ^ J ;
2) |k |=1, ale | ja x j| = |i | |J | grzech(90°)=1;
3) wektory i, j oraz k tworzą prawą potrójną (patrz ryc. 16).
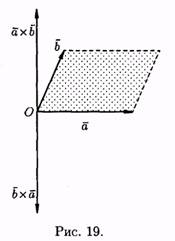
7.2. Właściwości produktu krzyżowego
1. Podczas przestawiania czynników iloczyn wektorowy zmienia znak, tj. i xb =(b xa) (patrz rys. 19).
Wektory a xb i b xa są współliniowe, mają te same moduły (obszar równoległoboku pozostaje niezmieniony), ale są skierowane przeciwnie (potrójne a, b, a xb i a, b, b x a o przeciwnej orientacji). To jest axb = -(b xa).
2. Iloczyn wektorowy ma właściwość łączenia w odniesieniu do współczynnika skalarnego, tj. l (a xb) = (l a) x b = a x (l b).
Niech l > 0. Wektor l (a xb) jest prostopadły do wektorów a i b. Wektor ( l topór B jest również prostopadła do wektorów a i B(wektory a, l ale leżą w tej samej płaszczyźnie). Oznacza to, że wektory l(axb) i ( l topór B współliniowy. Oczywiste jest, że ich kierunki są zbieżne. Mają tę samą długość:
Dlatego l(axb)= l xb. Udowodniono to w podobny sposób dla l<0.
3. Dwa niezerowe wektory a i B są współliniowe wtedy i tylko wtedy, gdy ich iloczyn wektorowy jest równy wektorowi zerowemu, tj. a ||b<=>i xb =0.

W szczególności i *i =j *j =k *k =0 .
4. Iloczyn wektorowy ma właściwość dystrybucji:
(a+b) xc = a xc + B xs.
Przyjmiemy bez dowodu.
7.3. Wyrażanie iloczynu krzyżowego we współrzędnych
Będziemy korzystać z tabeli iloczynów krzyżowych wektorów i, J ik:

jeśli kierunek najkrótszej ścieżki od pierwszego wektora do drugiego pokrywa się z kierunkiem strzałki, wówczas iloczyn jest równy trzeciemu wektorowi, jeśli się nie pokrywa, trzeci wektor jest przyjmowany ze znakiem minus.
Niech będą dane dwa wektory a =a x i +a y J+a z k oraz b = bx I+b y J+b z k. Znajdźmy iloczyn wektorowy tych wektorów, mnożąc je jako wielomiany (zgodnie z właściwościami iloczynu wektorowego):

![]()
Otrzymaną formułę można zapisać jeszcze krócej:

ponieważ prawa strona równości (7.1) odpowiada rozwinięciu wyznacznika trzeciego rzędu pod względem elementów pierwszego rzędu. Równość (7.2) jest łatwa do zapamiętania.
7.4. Niektóre zastosowania produktów krzyżowych
Ustalanie kolinearności wektorów

Znalezienie obszaru równoległoboku i trójkąta
Zgodnie z definicją iloczynu wektorów wektorów A oraz b |a xb | =|a| * |b |sing, tj. S par = |a x b |. A zatem D S =1/2|a x b |.
Wyznaczanie momentu siły względem punktu
Niech w punkcie A zostanie przyłożona siła F = AB Odpuść sobie O- jakiś punkt w przestrzeni (patrz ryc. 20).
Z fizyki wiadomo, że moment siły F w stosunku do punktu O zwany wektorem M, który przechodzi przez punkt O I:
1) prostopadle do płaszczyzny przechodzącej przez punkty O, A, B;
2) liczbowo równy iloczynowi siły na ramię
3) tworzy prawą trójkę z wektorami OA i A B.
Dlatego M = OA x F.
Znalezienie liniowej prędkości obrotowej
Prędkość w punkt M ciała sztywnego obracającego się z prędkością kątową w wokół ustalonej osi, wyznacza się wzorem Eulera v = w xr, gdzie r = OM, gdzie O jest pewnym stałym punktem osi (patrz rys. 21).

W tej lekcji przyjrzymy się dwóm kolejnym operacjom na wektorach: iloczyn wektorowy wektorów I mieszany produkt wektorów (link natychmiastowy dla potrzebujących). W porządku, czasami zdarza się, że dla pełnego szczęścia, w dodatku Iloczyn skalarny wektorów potrzeba coraz więcej. To jest uzależnienie od wektorów. Może się wydawać, że wkraczamy w dżunglę geometrii analitycznej. To jest źle. W tej części wyższej matematyki jest ogólnie mało drewna, może z wyjątkiem Pinokia. W rzeczywistości materiał jest bardzo powszechny i prosty - niewiele bardziej skomplikowany niż ten sam produkt skalarny, będzie jeszcze mniej typowych zadań. Najważniejsze w geometrii analitycznej, o czym wielu się przekona lub już przekonało, to NIE POPEŁNIAĆ BŁĘDÓW W OBLICZENIACH. Powtarzaj jak zaklęcie, a będziesz szczęśliwy =)
Jeśli wektory błyszczą gdzieś daleko, jak błyskawica na horyzoncie, nie ma to znaczenia, zacznij od lekcji Wektory dla manekinów przywrócenie lub ponowne zdobycie podstawowej wiedzy o wektorach. Bardziej przygotowani czytelnicy mogą zapoznać się z informacjami wybiórczo; starałem się zebrać jak najpełniejszy zbiór przykładów, które często można znaleźć w pracy praktycznej
Co sprawi, że od razu będziesz szczęśliwy? Kiedy byłem mały, umiałem żonglować dwiema, a nawet trzema piłkami. To zadziałało dobrze. Teraz nie będziesz musiał w ogóle żonglować, ponieważ rozważymy tylko wektory przestrzenne, a wektory płaskie z dwiema współrzędnymi zostaną pominięte. Dlaczego? Tak narodziły się te działania - wektor i iloczyn mieszany wektorów są definiowane i działają w przestrzeni trójwymiarowej. To już jest łatwiejsze!
Operacja ta, podobnie jak iloczyn skalarny, obejmuje dwa wektory. Niech to będą listy niezniszczalne.
Sama akcja oznaczony przez w następujący sposób: . Istnieją inne opcje, ale jestem przyzwyczajony do oznaczania iloczynu wektorów w ten sposób, w nawiasach kwadratowych z krzyżykiem.
I od razu pytanie: jeśli w Iloczyn skalarny wektorów w grę wchodzą dwa wektory i tutaj także dwa wektory są mnożone jaka jest różnica? Oczywistą różnicą jest przede wszystkim WYNIK:
Wynikiem iloczynu skalarnego wektorów jest LICZBA:
Wynikiem iloczynu wektorów jest WEKTOR: , czyli mnożymy wektory i ponownie otrzymujemy wektor. Zamknięty klub. Właściwie stąd wzięła się nazwa operacji. W różnej literaturze edukacyjnej oznaczenia mogą się również różnić; będę używał tej litery.
Definicja produktu krzyżowego
Najpierw będzie definicja ze zdjęciem, potem komentarze.
Definicja: Produkt wektorowy niewspółliniowy wektory, podjęte w tej kolejności, zwany WEKTOREM, długość czyli liczbowo równy obszarowi równoległoboku, zbudowane na tych wektorach; wektor ortogonalne do wektorów, i jest skierowany tak, aby podstawa miała właściwą orientację: 
Rozłóżmy definicję kawałek po kawałku, jest tu wiele interesujących rzeczy!
Można zatem wyróżnić następujące istotne punkty:
1) Oryginalne wektory, z definicji oznaczone czerwonymi strzałkami nie współliniowy. Przypadek wektorów współliniowych będzie odpowiedni do rozważenia nieco później.
2) Pobierane są wektory w ściśle określonej kolejności: – „a” jest mnożone przez „być”, a nie „być” z „a”. Wynik mnożenia wektorów to WEKTOR, zaznaczony na niebiesko. Jeśli wektory pomnożymy w odwrotnej kolejności, otrzymamy wektor o równej długości i przeciwnym kierunku (kolor malinowy). Oznacza to, że równość jest prawdziwa ![]() .
.
3) Teraz zapoznajmy się z geometrycznym znaczeniem iloczynu wektorowego. To bardzo ważny punkt! DŁUGOŚĆ niebieskiego wektora (a zatem wektora szkarłatnego) jest liczbowo równa POWIERZCHNI równoległoboku zbudowanego na wektorach. Na rysunku ten równoległobok jest zacieniowany na czarno.
Notatka : rysunek jest schematyczny i oczywiście nominalna długość produktu wektorowego nie jest równa powierzchni równoległoboku.
Przypomnijmy jeden ze wzorów geometrycznych: Pole równoległoboku jest równe iloczynowi sąsiednich boków i sinusowi kąta między nimi. Dlatego na podstawie powyższego obowiązuje wzór na obliczenie DŁUGOŚCI iloczynu wektorowego:
Podkreślam, że wzór dotyczy DŁUGOŚCI wektora, a nie samego wektora. Jakie jest praktyczne znaczenie? Znaczenie jest takie, że w problemach geometrii analitycznej obszar równoległoboku często znajduje się poprzez koncepcję iloczynu wektorowego:
Uzyskajmy drugi ważny wzór. Przekątna równoległoboku (czerwona przerywana linia) dzieli go na dwa równe trójkąty. Dlatego pole trójkąta zbudowanego na wektorach (czerwone cieniowanie) można znaleźć za pomocą wzoru:
4) Równie ważnym faktem jest to, że wektor jest ortogonalny do wektorów, tzn ![]() . Oczywiście wektor skierowany przeciwnie (malinowa strzałka) jest również ortogonalny do wektorów oryginalnych.
. Oczywiście wektor skierowany przeciwnie (malinowa strzałka) jest również ortogonalny do wektorów oryginalnych.
5) Wektor jest skierowany tak, że podstawa To ma Prawidłowy orientacja. Na lekcji o przejście na nową podstawę Mówiłem wystarczająco szczegółowo o orientacja płaska, a teraz dowiemy się, jaka jest orientacja przestrzenna. Wyjaśnię ci to na palcach prawa ręka. Mentalnie połączmy siły palec wskazujący z wektorem i środkowy palec z wektorem. Palec serdeczny i mały palec wciśnij go w dłoń. W rezultacie kciuk– produkt wektorowy wyświetli się. Jest to podstawa zorientowana na prawo (jest to ta na rysunku). Teraz zmień wektory ( palce wskazujące i środkowe) w niektórych miejscach, w wyniku czego kciuk się obróci, a produkt wektorowy będzie już patrzył w dół. Jest to również podstawa zorientowana na prawo. Możesz mieć pytanie: która podstawa opuściła orientację? „Przypisz” do tych samych palców lewa ręka wektory i uzyskaj lewą podstawę i lewą orientację przestrzeni (w tym przypadku kciuk będzie zlokalizowany w kierunku dolnego wektora). Mówiąc obrazowo, podstawy te „przekręcają” lub orientują przestrzeń w różnych kierunkach. I tej koncepcji nie należy uważać za coś naciąganego lub abstrakcyjnego - na przykład najzwyklejsze lustro zmienia orientację przestrzeni, a jeśli „wyciągniesz odbity obiekt z lustra”, to w ogólnym przypadku będzie to nie będzie możliwości połączenia go z „oryginałem”. Przy okazji podnieś trzy palce do lustra i przeanalizuj odbicie ;-)
...jak dobrze, że teraz o tym wiesz zorientowane na prawo i lewo baz, bo wypowiedzi niektórych wykładowców o zmianie orientacji są przerażające =)
Iloczyn krzyżowy wektorów współliniowych
Definicja została szczegółowo omówiona, pozostaje dowiedzieć się, co się dzieje, gdy wektory są współliniowe. Jeśli wektory są współliniowe, to można je ułożyć na jednej prostej i nasz równoległobok również „składa się” w jedną prostą. Obszar taki, jak mówią matematycy, zdegenerowany równoległobok jest równy zero. To samo wynika ze wzoru - sinus zera lub 180 stopni jest równy zeru, co oznacza, że pole wynosi zero
Zatem jeśli , to ![]() . Ściśle mówiąc, sam iloczyn wektorowy jest równy wektorowi zerowemu, ale w praktyce często jest to zaniedbywane i pisze się, że jest po prostu równy zero.
. Ściśle mówiąc, sam iloczyn wektorowy jest równy wektorowi zerowemu, ale w praktyce często jest to zaniedbywane i pisze się, że jest po prostu równy zero.
Szczególnym przypadkiem jest iloczyn wektora z samym sobą:
Za pomocą iloczynu wektorowego można sprawdzić kolinearność wektorów trójwymiarowych, będziemy także analizować m.in. ten problem.
Aby rozwiązać praktyczne przykłady, których możesz potrzebować tablica trygonometryczna znaleźć z niego wartości sinusów.
No to rozpalmy ogień:
Przykład 1
a) Znajdź długość iloczynu wektorów wektorów jeśli ![]()
b) Znajdź obszar równoległoboku zbudowanego na wektorach, jeśli ![]()
Rozwiązanie: Nie, to nie jest literówka, celowo ustaliłem, że początkowe dane w klauzulach są takie same. Ponieważ projekt rozwiązań będzie inny!
a) Zgodnie z warunkiem musisz znaleźć długość wektor (iloczyn krzyżowy). Zgodnie z odpowiednim wzorem:
Odpowiedź:
Jeśli zapytano Cię o długość, w odpowiedzi podajemy wymiar - jednostki.
b) Zgodnie z warunkiem musisz znaleźć kwadrat równoległobok zbudowany na wektorach. Pole tego równoległoboku jest liczbowo równe długości iloczynu wektorowego:
Odpowiedź:
Należy pamiętać, że odpowiedź w ogóle nie mówi o produkcie wektorowym; obszar figury odpowiednio wymiar jest jednostkami kwadratowymi.
Zawsze sprawdzamy, CO musimy znaleźć w zależności od warunku, i na tej podstawie formułujemy jasne odpowiedź. Może się to wydawać dosłownością, ale wśród nauczycieli jest wielu literalistów i istnieje duże prawdopodobieństwo, że zadanie zostanie zwrócone do sprawdzenia. Choć nie jest to szczególnie naciągana sprzeczka - jeśli odpowiedź jest błędna, to można odnieść wrażenie, że dana osoba nie rozumie prostych rzeczy i/lub nie zrozumiała istoty zadania. Tę kwestię należy zawsze mieć pod kontrolą przy rozwiązywaniu wszelkich problemów z matematyki wyższej, a także z innych przedmiotów.
Gdzie podziała się wielka litera „en”? W zasadzie można było to dodatkowo podpiąć do rozwiązania, jednak w celu skrócenia wpisu tego nie zrobiłem. Mam nadzieję, że wszyscy to rozumieją i jest to oznaczenie tego samego.
Popularny przykład rozwiązania typu „zrób to sam”:
Przykład 2
Znajdź obszar trójkąta zbudowanego na wektorach jeśli ![]()
Wzór na znalezienie pola trójkąta poprzez iloczyn wektorowy podano w komentarzach do definicji. Rozwiązanie i odpowiedź znajdują się na końcu lekcji.
W praktyce zadanie jest naprawdę bardzo powszechne; trójkąty mogą ogólnie cię dręczyć.
Aby rozwiązać inne problemy, będziemy potrzebować:
Własności iloczynu wektorowego wektorów
Rozważaliśmy już niektóre właściwości produktu wektorowego, jednak uwzględnię je na tej liście.
W przypadku dowolnych wektorów i dowolnej liczby prawdziwe są następujące właściwości:
1) W innych źródłach informacji ta pozycja zwykle nie jest wyróżniona we właściwościach, ale jest bardzo ważna z praktycznego punktu widzenia. Niech tak zostanie.
2) ![]() – nieruchomość jest również omawiana powyżej, czasami jest nazywana antykomutacyjność. Innymi słowy, kolejność wektorów ma znaczenie.
– nieruchomość jest również omawiana powyżej, czasami jest nazywana antykomutacyjność. Innymi słowy, kolejność wektorów ma znaczenie.
3) – asocjacyjne lub asocjacyjny prawa dotyczące produktów wektorowych. Stałe można łatwo przenosić poza iloczyn wektorowy. Właściwie, co powinni tam robić?
4) – dystrybucja lub dystrybucyjny prawa dotyczące produktów wektorowych. Nie ma też problemów z otwieraniem zamków.
Aby to zademonstrować, spójrzmy na krótki przykład:
Przykład 3
Znajdź jeśli ![]()
Rozwiązanie: Warunek ponownie wymaga znalezienia długości iloczynu wektorowego. Pomalujmy naszą miniaturę: 
(1) Zgodnie z prawami asocjacji stałe są poza zakresem iloczynu wektorowego.
(2) Wyciągamy stałą poza moduł, a moduł „zjada” znak minus. Długość nie może być ujemna.
(3) Reszta jest jasna.
Odpowiedź: ![]()
Czas dołożyć drewna do ognia:
Przykład 4
Oblicz pole trójkąta zbudowanego na wektorach, jeśli ![]()
Rozwiązanie: Znajdź obszar trójkąta za pomocą wzoru ![]() . Problem polega na tym, że wektory „tse” i „de” są same w sobie przedstawiane jako sumy wektorów. Algorytm tutaj jest standardowy i nieco przypomina przykłady nr 3 i 4 z lekcji Iloczyn skalarny wektorów. Dla przejrzystości rozwiązanie podzielimy na trzy etapy:
. Problem polega na tym, że wektory „tse” i „de” są same w sobie przedstawiane jako sumy wektorów. Algorytm tutaj jest standardowy i nieco przypomina przykłady nr 3 i 4 z lekcji Iloczyn skalarny wektorów. Dla przejrzystości rozwiązanie podzielimy na trzy etapy:
1) W pierwszym kroku wyrażamy iloczyn wektorowy poprzez iloczyn wektorowy, w rzeczywistości wyrażmy wektor za pomocą wektora. Nie ma jeszcze słowa na temat długości!

(1) Zastąp wyrażenia wektorów.
(2) Korzystając z praw rozdzielności, otwieramy nawiasy zgodnie z zasadą mnożenia wielomianów.
(3) Używając praw asocjacji, przenosimy wszystkie stałe poza iloczyny wektorowe. Przy odrobinie doświadczenia kroki 2 i 3 można wykonać jednocześnie.
(4) Pierwszy i ostatni wyraz są równe zeru (wektor zerowy) ze względu na własność nice. W drugim członie korzystamy z własności antyprzemienności iloczynu wektorowego:
(5) Przedstawiamy podobne terminy.
W rezultacie wektor okazał się wyrażony poprzez wektor, co należało osiągnąć: ![]()
2) W drugim kroku znajdujemy potrzebną długość iloczynu wektorowego. Ta akcja jest podobna do przykładu 3: 
3) Znajdź obszar wymaganego trójkąta: ![]()
Etapy 2-3 rozwiązania można było zapisać w jednym wierszu.
Odpowiedź:
Rozważany problem jest dość powszechny w testach, oto przykład samodzielnego rozwiązania:
Przykład 5
Znajdź jeśli
Krótkie rozwiązanie i odpowiedź na końcu lekcji. Zobaczmy, jak uważny byłeś, studiując poprzednie przykłady ;-)
Iloczyn krzyżowy wektorów we współrzędnych
, określone w bazie ortonormalnej, wyrażone wzorem:
Wzór jest naprawdę prosty: w górnym wierszu wyznacznika zapisujemy wektory współrzędnych, w drugim i trzecim wierszu „ustawiamy” współrzędne wektorów i umieszczamy w ścisłym porządku– najpierw współrzędne wektora „ve”, następnie współrzędne wektora „podwójnego ve”. Jeśli zachodzi potrzeba pomnożenia wektorów w innej kolejności, należy zamienić wiersze: 
Przykład 10
Sprawdź, czy następujące wektory przestrzenne są współliniowe:
A)
B) ![]()
Rozwiązanie: Sprawdzenie opiera się na jednym ze stwierdzeń z tej lekcji: jeśli wektory są współliniowe, to ich iloczyn wektorowy jest równy zeru (wektor zerowy): ![]() .
.
a) Znajdź iloczyn wektorowy: 
Zatem wektory nie są współliniowe.
b) Znajdź iloczyn wektorowy: 
Odpowiedź: a) nie współliniowy, b)
Być może tutaj znajdują się wszystkie podstawowe informacje na temat iloczynu wektorów wektorów.
Ta sekcja nie będzie zbyt obszerna, ponieważ istnieje niewiele problemów, gdy używany jest mieszany iloczyn wektorów. W rzeczywistości wszystko będzie zależeć od definicji, znaczenia geometrycznego i kilku działających wzorów.
Iloczyn mieszany wektorów to iloczyn trzech wektorów:
Ustawili się zatem w kolejce jak pociąg i nie mogą się doczekać, aż zostaną zidentyfikowani.
Na początek jeszcze raz definicja i obraz:
Definicja: Praca mieszana niewspółpłaszczyznowe wektory, podjęte w tej kolejności, zwany objętość równoległościenna, zbudowane na tych wektorach, oznaczone znakiem „+”, jeśli podstawa jest prawidłowa, oraz znakiem „–”, jeśli podstawa jest pozostawiona.
Zróbmy rysunek. Linie niewidoczne dla nas rysujemy liniami przerywanymi: 
Przejdźmy do definicji:
2) Pobierane są wektory w określonej kolejności, czyli przegrupowanie wektorów w iloczynie, jak można się domyślić, nie następuje bez konsekwencji.
3) Zanim skomentuję znaczenie geometryczne, zwrócę uwagę na oczywisty fakt: mieszany iloczyn wektorów to LICZBA: . W literaturze edukacyjnej projekt może być nieco inny; jestem przyzwyczajony do oznaczania produktu mieszanego przez , a wynik obliczeń literą „pe”.
A-przeorat produkt mieszany to objętość równoległościanu, zbudowane na wektorach (figura jest rysowana za pomocą czerwonych wektorów i czarnych linii). Oznacza to, że liczba jest równa objętości danego równoległościanu.
Notatka : Rysunek ma charakter schematyczny.
4) Nie martwmy się już o koncepcję orientacji podstawy i przestrzeni. Znaczenie ostatniej części jest takie, że do objętości można dodać znak minus. Krótko mówiąc, produkt mieszany może być negatywny: .
Bezpośrednio z definicji wynika wzór na obliczenie objętości równoległościanu zbudowanego na wektorach.