Ang modulus ng cross product ng dalawang vectors ay pantay. Cross product - mga kahulugan, katangian, formula, halimbawa at solusyon
Kahulugan Tinatawag ang nakaayos na koleksyon (x 1 , x 2 , ... , x n) n ng mga tunay na numero n-dimensional na vector, at ang mga numero x i (i = ) - mga bahagi o mga coordinate,
Halimbawa. Kung, halimbawa, ang isang partikular na planta ng sasakyan ay kailangang gumawa ng 50 kotse, 100 trak, 10 bus, 50 set ng ekstrang bahagi para sa mga kotse at 150 set para sa mga trak at bus bawat shift, kung gayon ang programa ng produksyon ng planta na ito ay maaaring isulat bilang isang vector (50, 100 , 10, 50, 150), na mayroong limang bahagi.
Notasyon. Ang mga vector ay tinutukoy ng mga naka-bold na maliliit na titik o mga titik na may bar o arrow sa itaas, halimbawa, a o. Ang dalawang vector ay tinatawag pantay kung mayroon silang parehong bilang ng mga bahagi at ang kanilang mga katumbas na bahagi ay pantay.
Hindi maaaring palitan ang mga bahagi ng vector, hal. (3, 2, 5, 0, 1) at (2, 3, 5, 0, 1) iba't ibang mga vector.
Mga operasyon sa mga vector. trabaho
x= (x 1 , x 2 , ... ,x n) sa isang tunay na numeroλ tinatawag na vectorλ x= (λ x 1 , λ x 2 , ... , λ x n).
sumx= (x 1 , x 2 , ... ,x n) at y= (y 1 , y 2 , ... ,y n) ay tinatawag na vector x+y= (x 1 + y 1 , x 2 + y 2 , ... , x n + + y n).
Ang espasyo ng mga vector. N -dimensional na espasyo ng vector R Ang n ay tinukoy bilang ang set ng lahat ng n-dimensional na vectors kung saan ang mga operasyon ng multiplikasyon sa pamamagitan ng tunay na mga numero at karagdagan ay tinukoy.
Ilustrasyon sa ekonomiya. Isang pang-ekonomiyang paglalarawan ng isang n-dimensional na vector space: espasyo ng mga kalakal (kalakal). Sa ilalim kalakal mauunawaan namin ang ilang mga produkto o serbisyo na ibinebenta sa isang tiyak na oras sa isang partikular na lugar. Ipagpalagay na mayroong isang tiyak na bilang ng mga kalakal na magagamit n; ang dami ng bawat isa sa kanila na binili ng mamimili ay nailalarawan sa pamamagitan ng isang hanay ng mga kalakal
x= (x 1 , x 2 , ..., x n),
kung saan ang x i ay nagsasaad ng halaga ng i-th good na binili ng mamimili. Ipagpalagay namin na ang lahat ng mga kalakal ay may pag-aari ng di-makatwirang divisibility, upang ang anumang hindi negatibong dami ng bawat isa sa kanila ay mabibili. Kung gayon ang lahat ng posibleng hanay ng mga kalakal ay mga vector ng espasyo ng mga kalakal C = ( x= (x 1 , x 2 , ... , x n) x i ≥ 0, i = ).
Linear na kalayaan.
Sistema e 1 , e 2 , ... , e m n-dimensional vectors ay tinatawag nakadepende sa linear kung may mga ganyang numeroλ 1 , λ 2 , ... , λ m , kung saan kahit isa ay nonzero, na nakakatugon sa pagkakapantay-pantayλ1 e 1 + λ2 e 2+...+λm e m = 0; kung hindi, ang sistemang ito ng mga vector ay tinatawag linearly independent, ibig sabihin, ang pagkakapantay-pantay na ito ay posible lamang sa kaso kapag lahat ![]() . Ang geometric na kahulugan ng linear dependence ng mga vectors sa R 3 , na binibigyang kahulugan bilang nakadirekta na mga segment, ipaliwanag ang mga sumusunod na theorems.
. Ang geometric na kahulugan ng linear dependence ng mga vectors sa R 3 , na binibigyang kahulugan bilang nakadirekta na mga segment, ipaliwanag ang mga sumusunod na theorems.
Teorama 1. Ang isang sistema na binubuo ng isang vector ay linearly dependent kung at kung ang vector na ito ay zero.
Teorama 2. Para sa dalawang vector na maging linearly dependent, kinakailangan at sapat na sila ay collinear (parallel).
Teorama 3 . Para sa tatlong vector na maging linearly dependent, ito ay kinakailangan at sapat na sila ay coplanar (nakahiga sa parehong eroplano).
Kaliwa at kanang triple ng mga vector. Isang triple ng mga non-coplanar vector a, b, c tinawag tama, kung ang tagamasid mula sa kanila karaniwang simula pag-bypass sa mga dulo ng mga vector a, b, c sa ayos na iyon ay tila nagpapatuloy sa clockwise. Kung hindi a, b, c -kaliwang triple. Ang lahat ng kanan (o kaliwa) triple ng mga vector ay tinatawag pare-pareho nakatuon.
Batayan at mga coordinate. Troika e 1, e 2 , e 3 non-coplanar vectors sa R 3 ang tumawag batayan, at ang mga vector mismo e 1, e 2 , e 3 - basic. Anumang vector a ay maaaring mapalawak sa isang natatanging paraan sa mga tuntunin ng mga batayan ng mga vector, iyon ay, maaari itong katawanin sa anyo
A= x 1 e 1 + x2 e 2 + x 3 e 3, (1.1)
ang mga numerong x 1 , x 2 , x 3 sa pagpapalawak (1.1) ay tinatawag mga coordinatea sa batayan e 1, e 2 , e 3 at ipinapahiwatig a(x 1 , x 2 , x 3).
Orthonormal na batayan. Kung ang mga vectors e 1, e 2 , e 3 ay pairwise perpendicular at ang haba ng bawat isa sa kanila ay katumbas ng isa, kung gayon ang batayan ay tinatawag orthonormal, at ang mga coordinate x 1 , x 2 , x 3 - hugis-parihaba. Ang mga batayang vector ng isang orthonormal na batayan ay ipapatala ako, j, k.
Ipagpalagay natin na sa kalawakan R 3 ang tamang sistema ng Cartesian rectangular coordinate (0, ako, j, k}.
Produktong vector. sining ng vector A bawat vector b tinatawag na vector c, na tinutukoy ng sumusunod na tatlong kundisyon:
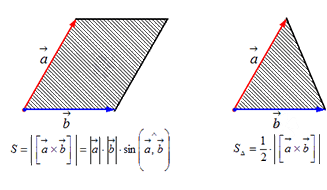
1. Haba ng vector c ayon sa bilang na katumbas ng lugar ng paralelogram na binuo sa mga vectors a At b, i.e.
c=
|a||b| kasalanan( a^b).
2. Vector c patayo sa bawat isa sa mga vectors a At b.
3. Mga Vector a, b At c, kinuha sa ganoong pagkakasunud-sunod, bumuo ng tamang triple.
Para sa produkto ng vector c ipinakilala ang pagtatalaga c=[ab] o
c = a
× b.
Kung ang mga vectors a At b ay collinear, pagkatapos ay kasalanan( a^b) = 0 at [ ab] = 0, sa partikular, [ aa] = 0. Vector na mga produkto ng orts: [ ij]=k, [jk] = i, [ki]=j.
Kung ang mga vectors a At b ibinigay sa batayan ako, j, k mga coordinate a(a 1 , a 2 , a 3), b(b 1 , b 2 , b 3), pagkatapos

Pinaghalong trabaho. Kung ang cross product ng dalawang vectors A At b scalar na pinarami ng ikatlong vector c, pagkatapos ay ang naturang produkto ng tatlong vectors ay tinatawag pinaghalong produkto at ipinapahiwatig ng simbolo a bc.
Kung ang mga vectors a, b At c sa batayan ako, j, k itinakda ng kanilang mga coordinate
a(a 1 , a 2 , a 3), b(b 1 , b 2 , b 3), c(c 1 , c 2 , c 3), pagkatapos
 .
.
Ang halo-halong produkto ay may isang simpleng geometric na interpretasyon - ito ay isang scalar, sa ganap na halaga na katumbas ng dami ng isang parallelepiped na binuo sa tatlong ibinigay na mga vectors.
Kung ang mga vector ay bumubuo ng isang tamang triple, kung gayon ang kanilang pinaghalong produkto ay isang positibong numero na katumbas ng tinukoy na dami; kung ang tatlo a, b, c - umalis, pagkatapos a b c<0 и V = - a b c, samakatuwid V =|a b c|.
Ang mga coordinate ng mga vector na nakatagpo sa mga problema ng unang kabanata ay ipinapalagay na ibinibigay na may kaugnayan sa tamang orthonormal na batayan. Unit vector codirectional sa vector A, ipinapahiwatig ng simbolo A O. Simbolo r=OM tinutukoy ng radius vector ng point M, ang mga simbolo a, AB o|a|, | AB |ang mga module ng mga vector ay tinutukoy A At AB.
Halimbawa 1.2. Hanapin ang anggulo sa pagitan ng mga vector a= 2m+4n At b= m-n, Saan m At n- unit vectors at anggulo sa pagitan m At n katumbas ng 120 o.
Solusyon. Mayroon kaming: cos φ = ab/ab, ab=(2m+4n) (m-n) = 2m 2 - 4n 2 +2mn=
= 2 - 4+2cos120 o = - 2 + 2(-0.5) = -3; a = ; a 2 = (2m+4n) (2m+4n) =
= 4m 2 +16mn+16n 2 = 4+16(-0.5)+16=12, kaya a = . b= ; b 2 =
= (m-n)(m-n) = m 2 -2mn+n 2 =
1-2(-0.5)+1 = 3, kaya b = . Sa wakas mayroon na tayong: cosφ \u003d -1/2, φ \u003d 120 o.
Halimbawa 1.3.Pag-alam ng mga vector AB(-3,-2.6) at BC(-2,4,4), kalkulahin ang taas AD ng tatsulok na ABC.
Solusyon. Ang pagtukoy sa lugar ng tatsulok na ABC ng S, nakukuha natin:
S = 1/2 B.C. AD. Pagkatapos AD=2S/BC, BC== ![]() = 6,
= 6,
S = 1/2| AB ×AC |.
AC=AB+BC, kaya ang vector AC may mga coordinate
.
.
Halimbawa 1.4 . Ibinigay ang dalawang vectors a(11,10,2) at b(4,0,3). Hanapin ang unit vector c, orthogonal sa mga vector a At b at itinuro upang ang iniutos na triple ng mga vectors a, b, c ay tama.
Solusyon.Tukuyin natin ang mga coordinate ng vector c na may paggalang sa ibinigay na tamang orthonormal na batayan sa mga tuntunin ng x, y, z.
Dahil ang c ⊥ a, c ⊥b, Iyon ca= 0, cb= 0. Sa kondisyon ng problema, kinakailangan na c = 1 at a b c >0.
Mayroon kaming isang sistema ng mga equation para sa paghahanap ng x,y,z: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
Mula sa una at pangalawang equation ng system ay nakukuha natin ang z = -4/3 x, y = -5/6 x. Ang pagpapalit ng y at z sa ikatlong equation, magkakaroon tayo ng: x 2 = 36/125, kung saan
x=±
. Gamit ang kundisyon a b c > 0, nakukuha natin ang hindi pagkakapantay-pantay

Isinasaalang-alang ang mga expression para sa z at y, muling isinulat namin ang nagresultang hindi pagkakapantay-pantay sa anyo: 625/6 x > 0, kung saan sinusundan nito ang x>0. Kaya x = , y = - , z = - .
Yandex.RTB R-A-339285-1Bago ibigay ang konsepto ng isang produkto ng vector, buksan natin ang tanong ng oryentasyon ng inayos na triple ng mga vector a → , b → , c → sa tatlong-dimensional na espasyo.
Upang magsimula, isantabi natin ang mga vectors a → , b → , c → mula sa isang punto. Ang oryentasyon ng triple a → , b → , c → ay kanan o kaliwa, depende sa direksyon ng vector c → . Mula sa direksyon kung saan ginawa ang pinakamaikling pagliko mula sa vector a → hanggang b → mula sa dulo ng vector c → , matutukoy ang anyo ng triple a → , b → , c →.
Kung ang pinakamaikling pag-ikot ay counterclockwise, kung gayon ang triple ng mga vectors a → , b → , c → ay tinatawag tama kung clockwise - umalis.
Susunod, kumuha ng dalawang non-collinear vectors a → at b → . Ipagpaliban natin ang mga vector na A B → = a → at A C → = b → mula sa puntong A. Bumuo tayo ng vector A D → = c → , na sabay na patayo sa parehong A B → at A C → . Kaya, kapag bumubuo ng vector A D → = c →, maaari tayong gumawa ng dalawang bagay, na binibigyan ito ng alinman sa isang direksyon o ang kabaligtaran (tingnan ang ilustrasyon).

Ang inayos na trio ng mga vectors a → , b → , c → ay maaaring, tulad ng nalaman namin, pakanan o pakaliwa depende sa direksyon ng vector.
Mula sa itaas, maaari nating ipakilala ang kahulugan ng isang produkto ng vector. Ang kahulugan na ito ay ibinigay para sa dalawang vector na tinukoy sa isang hugis-parihaba na coordinate system ng tatlong-dimensional na espasyo.
Kahulugan 1
Ang produkto ng vector ng dalawang vectors a → at b → tatawagin natin ang gayong vector na ibinigay sa isang hugis-parihaba na sistema ng coordinate ng tatlong-dimensional na espasyo tulad na:
- kung ang mga vectors a → at b → ay collinear, ito ay magiging zero;
- ito ay magiging patayo sa parehong vector a → at vector b → i.e. ∠ a → c → = ∠ b → c → = π 2 ;
- ang haba nito ay tinutukoy ng formula: c → = a → b → sin ∠ a → , b → ;
- ang triplet ng mga vectors a → , b → , c → ay may parehong oryentasyon gaya ng ibinigay na coordinate system.
Ang cross product ng mga vectors a → at b → ay may sumusunod na notasyon: a → × b → .
Mga cross product coordinate
Dahil ang anumang vector ay may ilang partikular na coordinate sa sistema ng coordinate, posibleng magpakilala ng pangalawang kahulugan ng produkto ng vector, na magbibigay-daan sa iyo upang mahanap ang mga coordinate nito mula sa ibinigay na mga coordinate ng mga vector.
Kahulugan 2
Sa isang rectangular coordinate system ng three-dimensional na espasyo produkto ng vector ng dalawang vector a → = (a x ; a y ; a z) at b → = (b x ; b y ; b z) tawagan ang vector c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , kung saan ang i → , j → , k → ay mga coordinate vector.
Ang produkto ng vector ay maaaring katawanin bilang isang determinant ng isang parisukat na matrix ng ikatlong pagkakasunud-sunod, kung saan ang unang hilera ay ang orta vectors i → , j → , k → , ang pangalawang hilera ay naglalaman ng mga coordinate ng vector a → , at ang pangatlo ay ang mga coordinate ng vector b → sa isang ibinigay na rectangular coordinate system, ganito ang hitsura ng matrix determinant na ito: c → = a → × b → = i → j → k → a x a y a z b x b y b z
Ang pagpapalawak ng determinant na ito sa mga elemento ng unang hilera, nakukuha natin ang pagkakapantay-pantay: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z i → - a x a z b x b z j → + a x a y b x = → b → a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
Mga katangian ng cross product
Ito ay kilala na ang produkto ng vector sa mga coordinate ay kinakatawan bilang ang determinant ng matrix c → = a → × b → = i → j → k → a x a y a z b x b y b z , pagkatapos ay sa base mga katangian ng matrix determinant ang mga sumusunod mga katangian ng produkto ng vector:
- anticommutativity a → × b → = - b → × a → ;
- distributivity a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → o a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- associativity λ a → × b → = λ a → × b → o a → × (λ b →) = λ a → × b → , kung saan ang λ ay isang arbitrary real number.
Ang mga katangiang ito ay walang kumplikadong mga patunay.
Halimbawa, maaari nating patunayan ang katangian ng anticommutativity ng isang produkto ng vector.
Patunay ng anticommutativity
Sa kahulugan, a → × b → = i → j → k → a x a y a z b x b y b z at b → × a → = i → j → k → b x b y b z a x a y a z . At kung ang dalawang hilera ng matrix ay ipinagpalit, ang halaga ng determinant ng matrix ay dapat magbago sa kabaligtaran, samakatuwid, a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , na at nagpapatunay ng anticommutativity ng vector product.
Vector Product - Mga Halimbawa at Solusyon
Sa karamihan ng mga kaso, mayroong tatlong uri ng mga gawain.
Sa mga problema ng unang uri, ang mga haba ng dalawang vector at ang anggulo sa pagitan ng mga ito ay karaniwang ibinibigay, ngunit kailangan mong hanapin ang haba ng cross product. Sa kasong ito, gamitin ang sumusunod na formula c → = a → b → sin ∠ a → , b → .
Halimbawa 1
Hanapin ang haba ng cross product ng mga vectors a → at b → kung a → = 3 , b → = 5 , ∠ a → , b → = π 4 ay kilala.
Solusyon
Gamit ang kahulugan ng haba ng produkto ng vector ng mga vectors a → at b →, lutasin natin ang problemang ito: a → × b → = a → b → sin ∠ a → , b → = 3 5 sin π 4 = 15 2 2 .
Sagot: 15 2 2 .
Ang mga gawain ng pangalawang uri ay may koneksyon sa mga coordinate ng mga vector, naglalaman sila ng isang produkto ng vector, haba nito, atbp. Hinahanap sa pamamagitan ng mga kilalang coordinate ng mga ibinigay na vectors a → = (a x ; a y ; a z) At b → = (b x ; b y ; b z) .
Para sa ganitong uri ng gawain, maaari mong lutasin ang maraming mga opsyon para sa mga gawain. Halimbawa, hindi ang mga coordinate ng mga vectors a → at b → , ngunit ang kanilang mga pagpapalawak sa mga coordinate vectors ng form b → = b x i → + b y j → + b z k → at c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , o ang mga vectors a → at b → ay maaaring ibigay ng mga coordinate ng kanilang mga punto ng pagsisimula at pagtatapos.
Isaalang-alang ang sumusunod na mga halimbawa.
Halimbawa 2
Dalawang vector ang nakatakda sa isang rectangular coordinate system a → = (2 ; 1 ; - 3) , b → = (0 ; - 1 ; 1) . Hanapin ang kanilang produkto ng vector.
Solusyon
Ayon sa pangalawang kahulugan, nakita natin ang produkto ng vector ng dalawang vector sa ibinigay na mga coordinate: a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → = = (1 1 - (- 3) (- 1)) i → + ((- 3) 0 - 2 1) j → + (2 (- 1) - 1 0) k → = = - 2 i → - 2 j → - 2 k → .
Kung isusulat natin ang produkto ng vector sa pamamagitan ng matrix determinant, ang solusyon ng halimbawang ito ay ang mga sumusunod: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
Sagot: a → × b → = - 2 i → - 2 j → - 2 k → .
Halimbawa 3
Hanapin ang haba ng cross product ng mga vectors i → - j → at i → + j → + k → , kung saan i → , j → , k → - orts ng isang rectangular Cartesian coordinate system.
Solusyon
Una, hanapin natin ang mga coordinate ng ibinigay na produkto ng vector i → - j → × i → + j → + k → sa ibinigay na rectangular coordinate system.
Ito ay kilala na ang mga vectors i → - j → at i → + j → + k → ay may mga coordinate (1 ; - 1 ; 0) at (1 ; 1 ; 1) ayon sa pagkakabanggit. Hanapin ang haba ng produkto ng vector gamit ang matrix determinant, pagkatapos ay mayroon tayong i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
Samakatuwid, ang produkto ng vector i → - j → × i → + j → + k → ay may mga coordinate (- 1 ; - 1 ; 2) sa ibinigay na coordinate system.
Nahanap namin ang haba ng produkto ng vector sa pamamagitan ng formula (tingnan ang seksyon sa paghahanap ng haba ng vector): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6 .
Sagot: i → - j → × i → + j → + k → = 6 . .
Halimbawa 4
Ang mga coordinate ng tatlong puntos A (1 , 0 , 1) , B (0 , 2, 3) , C (1, 4, 2) ay ibinibigay sa isang hugis-parihaba na Cartesian coordinate system. Maghanap ng ilang vector na patayo sa A B → at A C → sa parehong oras.
Solusyon
Ang mga Vector A B → at A C → ay may mga sumusunod na coordinate (- 1 ; 2 ; 2) at (0 ; 4 ; 1) ayon sa pagkakabanggit. Ang pagkakaroon ng natagpuan ang produkto ng vector ng mga vectors A B → at A C → , malinaw na ito ay isang patayong vector sa pamamagitan ng kahulugan sa parehong A B → at A C → , iyon ay, ito ang solusyon sa ating problema. Hanapin ito A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
Sagot: - 6 i → + j → - 4 k → . ay isa sa mga perpendicular vectors.
Ang mga problema ng ikatlong uri ay nakatuon sa paggamit ng mga katangian ng produkto ng vector ng mga vector. Pagkatapos mag-apply kung alin, makakakuha tayo ng solusyon sa ibinigay na problema.
Halimbawa 5
Ang mga vectors a → at b → ay patayo at ang kanilang mga haba ay 3 at 4 ayon sa pagkakabanggit. Hanapin ang haba ng cross product 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → .
Solusyon
Sa pamamagitan ng distributivity property ng vector product, maaari nating isulat ang 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
Sa pamamagitan ng pag-aari ng associativity, kinukuha namin ang mga numerical coefficient na lampas sa tanda ng mga produkto ng vector sa huling expression: 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → = = 3 a → × a → + 3 (- 2) a → × b → + (- 1) b → × a → + (- 1) (- 2) b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
Ang mga produktong vector a → × a → at b → × b → ay katumbas ng 0, dahil a → × a → = a → a → sin 0 = 0 at b → × b → = b → b → sin 0 = 0 , pagkatapos ay 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b → = - 6 a → × b → - b → × a → . .
Mula sa anticommutativity ng vector product ito ay sumusunod - 6 a → × b → - b → × a → = - 6 a → × b → - (- 1) a → × b → = - 5 a → × b → . .
Gamit ang mga katangian ng produkto ng vector, nakukuha natin ang pagkakapantay-pantay 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
Sa pamamagitan ng kondisyon, ang mga vectors a → at b → ay patayo, iyon ay, ang anggulo sa pagitan ng mga ito ay katumbas ng π 2 . Ngayon ay nananatili lamang na palitan ang mga nahanap na halaga sa kaukulang mga formula: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → sin (a →, b →) = 5 3 4 sin π 2 = 60.
Sagot: 3 a → - b → × a → - 2 b → = 60 .
Ang haba ng cross product ng mga vectors ayon sa kahulugan ay a → × b → = a → · b → · sin ∠ a → , b → . Dahil ito ay kilala na (mula sa kurso sa paaralan) na ang lugar ng isang tatsulok ay kalahati ng produkto ng mga haba ng dalawang panig nito na pinarami ng sine ng anggulo sa pagitan ng mga ibinigay na panig. Samakatuwid, ang haba ng produkto ng vector ay katumbas ng lugar ng isang paralelogram - isang dobleng tatsulok, ibig sabihin, ang produkto ng mga gilid sa anyo ng mga vectors a → at b → , na tinanggal mula sa isang punto, ng sine. ng anggulo sa pagitan nila sin ∠ a → , b → .
Ito ang geometric na kahulugan ng produkto ng vector.
Ang pisikal na kahulugan ng produkto ng vector
Sa mekanika, isa sa mga sangay ng pisika, salamat sa produkto ng vector, maaari mong matukoy ang sandali ng puwersa na nauugnay sa isang punto sa espasyo.
Kahulugan 3
Sa ilalim ng sandali ng puwersa F → , inilapat sa punto B , kaugnay sa punto A mauunawaan natin ang sumusunod na produkto ng vector A B → × F → .
Kung may napansin kang pagkakamali sa text, mangyaring i-highlight ito at pindutin ang Ctrl+Enter
Unit vector- Ito vector, ganap na halaga(module) kung saan ay katumbas ng isa. Upang tukuyin ang isang unit vector, gagamitin namin ang subscript e. Kaya, kung ang isang vector ay ibinigay A, kung gayon ang vector ng unit nito ang magiging vector A e. Ang vector ng unit na ito ay tumuturo sa parehong direksyon tulad ng mismong vector A, at ang modulus nito ay katumbas ng isa, iyon ay, isang e \u003d 1.
Obviously, A= a A e (a - modulus ng vector A). Sumusunod ito mula sa panuntunan kung saan isinasagawa ang operasyon ng pagpaparami ng scalar sa isang vector.
Mga vector ng unit madalas na nauugnay sa mga coordinate axes ng coordinate system (sa partikular, sa mga axes ng Cartesian coordinate system). Direksyon ng mga ito mga vector nag-tutugma sa mga direksyon ng kaukulang mga palakol, at ang kanilang mga pinagmulan ay madalas na pinagsama sa pinagmulan ng sistema ng coordinate.
Hayaan mong ipaalala ko sa iyo iyon Cartesian coordinate system sa kalawakan ay tradisyunal na tinatawag na isang triple ng mutually perpendicular axes na nagsasalubong sa isang punto na tinatawag na pinanggalingan. Ang mga coordinate axes ay karaniwang tinutukoy ng mga letrang X, Y, Z at tinatawag na abscissa axis, ang ordinate axis, at ang applicate axis, ayon sa pagkakabanggit. Si Descartes mismo ay gumamit lamang ng isang axis, kung saan ang mga abscissas ay naka-plot. merito ng paggamit mga sistema axes ay pag-aari ng kanyang mga mag-aaral. Samakatuwid ang parirala sistemang cartesian mga coordinate mali sa kasaysayan. Mas magandang pag-usapan hugis-parihaba sistema ng coordinate o orthogonal coordinate system. Gayunpaman, hindi namin babaguhin ang mga tradisyon at sa hinaharap ay ipapalagay namin na ang Cartesian at rectangular (orthogonal) coordinate system ay iisa at pareho.
Unit vector Ang , na nakadirekta sa X axis, ay tinutukoy i, unit vector, nakadirekta sa kahabaan ng Y axis, ay tinutukoy j, A unit vector, nakadirekta sa kahabaan ng Z axis, ay tinutukoy k. Mga vector i, j, k tinawag orts(Larawan 12, kaliwa), mayroon silang mga solong module, iyon ay
i = 1, j = 1, k = 1.
mga palakol at orts rectangular coordinate system sa ilang mga kaso mayroon silang iba pang mga pangalan at pagtatalaga. Kaya, ang abscissa axis X ay maaaring tawaging tangent axis, at ang unit vector nito ay tinutukoy τ (Greek maliit na titik tau), ang y-axis ay ang normal na axis, ang unit vector nito ay denoted n, ang applicate axis ay ang axis ng binormal, ang unit vector nito ay denoted b. Bakit papalitan ang mga pangalan kung ang kakanyahan ay nananatiling pareho?
Ang katotohanan ay, halimbawa, sa mekanika, kapag pinag-aaralan ang paggalaw ng mga katawan, ang isang hugis-parihaba na sistema ng coordinate ay madalas na ginagamit. Kaya, kung ang sistema ng coordinate mismo ay hindi gumagalaw, at ang pagbabago sa mga coordinate ng isang gumagalaw na bagay ay sinusubaybayan sa hindi gumagalaw na sistemang ito, kadalasan ang mga axes ay nagpapahiwatig ng X, Y, Z, at ang kanilang orts ayon sa pagkakabanggit i, j, k.
Ngunit madalas, kapag ang isang bagay ay gumagalaw kasama ang ilang uri ng curvilinear trajectory (halimbawa, kasama ang isang bilog), mas maginhawang isaalang-alang ang mga mekanikal na proseso sa isang coordinate system na gumagalaw kasama ang bagay na ito. Ito ay para sa isang gumagalaw na sistema ng coordinate na ginagamit ang iba pang mga pangalan ng mga axes at ang kanilang mga unit vector. Tanggap na lang. Sa kasong ito, ang X-axis ay nakadirekta nang tangential sa trajectory sa punto kung saan sa sandaling ito ang bagay na ito ay matatagpuan. At pagkatapos ang axis na ito ay hindi na tinatawag na X axis, ngunit ang tangent axis, at ang unit vector nito ay hindi na tinutukoy. i, A τ . Ang Y axis ay nakadirekta kasama ang radius ng curvature ng trajectory (sa kaso ng paggalaw sa isang bilog - sa gitna ng bilog). At dahil ang radius ay patayo sa tangent, ang axis ay tinatawag na axis ng normal (perpendicular at normal ay ang parehong bagay). Ang ort ng axis na ito ay hindi na tinutukoy j, A n. Ang ikatlong axis (ang dating Z) ay patayo sa dalawang nauna. Ito ay isang binormal na may vector b(Larawan 12, kanan). Sa pamamagitan ng paraan, sa kasong ito rectangular coordinate system madalas na tinutukoy bilang "natural" o natural.
Kahulugan. Ang produkto ng vector ng isang vector a (multiplier) ng isang vector (multiplier) na hindi collinear dito ay ang ikatlong vector c (produkto), na itinayo tulad ng sumusunod:
1) ang modulus nito ay katumbas ng numero sa lugar ng parallelogram sa fig. 155), na binuo sa mga vector, ibig sabihin, ito ay katumbas ng direksyon na patayo sa eroplano ng nabanggit na paralelogram;
3) sa kasong ito, ang direksyon ng vector c ay pinili (mula sa dalawang posible) upang ang mga vectors c ay bumuo ng isang kanang kamay na sistema (§ 110).
Pagtatalaga: o
Addendum sa kahulugan. Kung ang mga vector ay collinear, pagkatapos ay isinasaalang-alang ang figure bilang isang (kondisyon) parallelogram, natural na magtalaga ng zero area. Samakatuwid, ang produkto ng vector ng mga collinear vector ay itinuturing na katumbas ng null vector.

Dahil ang null vector ay maaaring italaga sa anumang direksyon, ang convention na ito ay hindi sumasalungat sa mga aytem 2 at 3 ng kahulugan.
Remark 1. Sa terminong "vector product", ang unang salita ay nagpapahiwatig na ang resulta ng isang aksyon ay isang vector (kumpara sa isang scalar product; cf. § 104, remark 1).
Halimbawa 1. Hanapin ang produkto ng vector kung saan ang mga pangunahing vector ng tamang sistema ng coordinate (Fig. 156).
1. Dahil ang mga haba ng mga pangunahing vector ay katumbas ng scale unit, ang lugar ng parallelogram (parisukat) ay numerong katumbas ng isa. Samakatuwid, ang modulus ng produkto ng vector ay katumbas ng isa.
2. Dahil ang patayo sa eroplano ay ang axis, ang nais na produkto ng vector ay isang vector collinear sa vector k; at dahil pareho silang may modulus 1, ang kinakailangang cross product ay alinman sa k o -k.
3. Sa dalawang posibleng vector na ito, dapat piliin ang una, dahil ang mga vectors ay bumubuo ng isang tamang sistema (at ang mga vector ay bumubuo ng isang kaliwa).
Halimbawa 2. Hanapin ang cross product
Solusyon. Tulad ng halimbawa 1, napagpasyahan namin na ang vector ay alinman sa k o -k. Ngunit ngayon kailangan nating pumili -k, dahil ang mga vector ay bumubuo ng tamang sistema (at ang mga vector ay bumubuo sa kaliwa). Kaya,
Halimbawa 3 Ang mga vector ay may haba na 80 at 50 cm, ayon sa pagkakabanggit, at bumubuo ng isang anggulo na 30°. Pagkuha ng metro bilang isang yunit ng haba, hanapin ang haba ng produkto ng vector a

Solusyon. Ang lugar ng isang paralelogram na binuo sa mga vector ay katumbas ng Ang haba ng nais na produkto ng vector ay katumbas ng
Halimbawa 4. Hanapin ang haba ng cross product ng parehong mga vector, na kumukuha ng isang sentimetro bilang isang yunit ng haba.
Solusyon. Dahil ang lugar ng parallelogram na binuo sa mga vector ay katumbas ng haba ng produkto ng vector ay 2000 cm, i.e.
Ang paghahambing ng mga halimbawa 3 at 4 ay nagpapakita na ang haba ng vector ay nakasalalay hindi lamang sa mga haba ng mga kadahilanan, kundi pati na rin sa pagpili ng yunit ng haba.
Ang pisikal na kahulugan ng produkto ng vector. Sa maraming pisikal na dami na kinakatawan ng produkto ng vector, isasaalang-alang lamang natin ang sandali ng puwersa.
Hayaan ang A ang punto ng aplikasyon ng puwersa. Ang sandali ng puwersa na nauugnay sa puntong O ay tinatawag na produkto ng vector. Dahil ang module ng produktong vector na ito ay katumbas ng numero sa lugar ng parallelogram (Fig. 157), ang module ng sandali ay katumbas ng produkto ng base sa pamamagitan ng taas, ibig sabihin, ang puwersa na pinarami ng distansya mula sa puntong O hanggang sa tuwid na linya kung saan kumikilos ang puwersa.
Sa mechanics, napatunayan na para sa ekwilibriyo matibay na katawan kinakailangan na hindi lamang ang kabuuan ng mga vector na kumakatawan sa mga puwersa na inilapat sa katawan ay katumbas ng zero, kundi pati na rin ang kabuuan ng mga sandali ng mga puwersa. Sa kaso kapag ang lahat ng pwersa ay parallel sa parehong eroplano, ang pagdaragdag ng mga vector na kumakatawan sa mga sandali ay maaaring mapalitan ng pagdaragdag at pagbabawas ng kanilang moduli. Ngunit para sa mga di-makatwirang direksyon ng mga puwersa, ang gayong kapalit ay imposible. Alinsunod dito, ang cross product ay tiyak na tinukoy bilang isang vector, at hindi bilang isang numero.

7.1. Kahulugan ng cross product
Tatlong non-coplanar vectors a , b at c , na kinuha sa ipinahiwatig na pagkakasunud-sunod, ay bumubuo ng right triple kung mula sa dulo ng ikatlong vector c ang pinakamaikling pagliko mula sa unang vector a hanggang sa pangalawang vector b ay makikita na counterclockwise, at isang kaliwa kung clockwise (tingnan ang Fig. 16).
Ang produkto ng vector ng isang vector a at vector b ay tinatawag na vector c, na:
1. Patayo sa mga vectors a at b, ibig sabihin, c ^ a at c ^ b;
2. Ito ay may haba ayon sa bilang na katumbas ng lugar ng paralelogram na binuo sa mga vectors a atb tulad ng sa mga gilid (tingnan ang fig. 17), i.e.
3. Ang mga vectors a , b at c ay bumubuo ng right triple.


Ang produkto ng vector ay tinutukoy ng isang x b o [a,b]. Mula sa kahulugan ng isang produkto ng vector, ang mga sumusunod na ugnayan sa pagitan ng mga orts ay direktang sinusunod ko, j At k(tingnan ang fig. 18):
i x j \u003d k, j x k \u003d i, k x i \u003d j.
Patunayan natin, halimbawa, iyon i xj \u003d k.
1) k ^ i , k ^ j;
2) |k |=1, ngunit | ako x j| = |i | |J| kasalanan(90°)=1;
3) mga vector i , j at k bumuo ng isang kanang triple (tingnan ang Fig. 16).
7.2. Mga katangian ng cross product
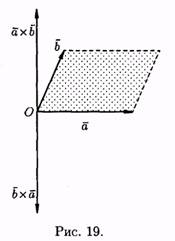
1. Kapag ang mga kadahilanan ay muling inayos, ang produkto ng vector ay nagbabago ng tanda, i.e. at xb \u003d (b xa) (tingnan ang Fig. 19).
Ang mga vector a xb at b xa ay collinear, may parehong mga module (ang lugar ng parallelogram ay nananatiling hindi nagbabago), ngunit magkasalungat na direksyon (triples a, b, a xb at a, b, b x a ng kabaligtaran na oryentasyon). Yan ay axb = -(bxa).
2. Ang produkto ng vector ay may kumbinasyon na katangian na may paggalang sa isang scalar factor, ibig sabihin, l (a xb) \u003d (l a) x b \u003d a x (l b).
Hayaan ang l >0. Ang vector l (a xb) ay patayo sa mga vectors a at b. Vector ( l a) x b ay patayo din sa mga vectors a at b(mga vector a, l ngunit nakahiga sa parehong eroplano). Kaya ang mga vectors l(a xb) at ( l a) x b collinear. Obvious naman na magkasabay ang direksyon nila. Sila ay may parehong haba:
kaya lang l(a xb)= l isang xb. Ito ay napatunayang katulad para sa l<0.
3. Dalawang di-zero na vector a at b ay collinear kung at kung ang kanilang produkto ng vector ay katumbas ng zero vector, ibig sabihin, at ||b<=>at xb \u003d 0.

Sa partikular, i *i =j *j =k *k =0 .
4. Ang produkto ng vector ay may katangian ng pamamahagi:
(a+b) xs = isang xs + b xs .
Tanggapin nang walang patunay.
7.3. Cross product expression sa mga tuntunin ng mga coordinate
Gagamitin namin ang vector cross product table i , j at k:

kung ang direksyon ng pinakamaikling landas mula sa unang vector hanggang sa pangalawa ay tumutugma sa direksyon ng arrow, kung gayon ang produkto ay katumbas ng pangatlong vector, kung hindi ito tumugma, ang ikatlong vector ay kinuha na may minus sign.
Hayaan ang dalawang vectors a =a x i +a y j+az k at b=bx i+sa pamamagitan ng j+bz k. Hanapin natin ang produkto ng vector ng mga vector na ito sa pamamagitan ng pagpaparami sa kanila bilang mga polynomial (ayon sa mga katangian ng produkto ng vector):

![]()
Ang resultang pormula ay maaaring maisulat nang mas maikli:

dahil ang kanang bahagi ng pagkakapantay-pantay (7.1) ay tumutugma sa pagpapalawak ng third-order determinant sa mga tuntunin ng mga elemento ng unang hilera. Ang pagkakapantay-pantay (7.2) ay madaling matandaan.
7.4. Ang ilang mga aplikasyon ng cross product
Pagtatatag ng collinearity ng mga vectors

Paghahanap ng lugar ng isang paralelogram at isang tatsulok
Ayon sa kahulugan ng cross product ng mga vectors A at b |a xb | =| isang | * |b |sin g , ibig sabihin, S par = |a x b |. At, samakatuwid, D S \u003d 1/2 | a x b |.
Pagtukoy sa sandali ng puwersa tungkol sa isang punto
Hayaang maglapat ng puwersa sa punto A F =AB bumitaw TUNGKOL SA- ilang punto sa espasyo (tingnan ang Fig. 20).

Ito ay kilala mula sa pisika na metalikang kuwintas F kaugnay sa punto TUNGKOL SA tinatawag na vector M , na dumadaan sa punto TUNGKOL SA At:
1) patayo sa eroplano na dumadaan sa mga punto O, A, B;
2) ayon sa bilang na katumbas ng produkto ng puwersa at braso
3) bumubuo ng tamang triple na may mga vectors OA at A B .
Samakatuwid, M \u003d OA x F.
Paghahanap ng linear na bilis ng pag-ikot
Bilis v point M ng isang matibay na katawan na umiikot sa isang angular na bilis w sa paligid ng isang nakapirming axis, ay tinutukoy ng Euler formula v \u003d w x r, kung saan r \u003d OM, kung saan ang O ay ilang nakapirming punto ng axis (tingnan ang Fig. 21).
