ორი ვექტორის ვექტორული ნამრავლის მოდული ტოლია. ჯვარედინი პროდუქტი - განმარტებები, თვისებები, ფორმულები, მაგალითები და გადაწყვეტილებები
განმარტება (x 1 , x 2 , ... , x n) n რეალური რიცხვების დალაგებული კრებული ეწოდება n-განზომილებიანი ვექტორიდა რიცხვები x i (i = ) - კომპონენტები,ან კოორდინატები,
მაგალითი. თუ, მაგალითად, საავტომობილო ქარხანამ უნდა აწარმოოს 50 მანქანა, 100 სატვირთო მანქანა, 10 ავტობუსი, მანქანების სათადარიგო ნაწილების 50 კომპლექტი და სატვირთო მანქანებისა და ავტობუსების 150 კომპლექტი ცვლაში, მაშინ ამ ქარხნის საწარმოო პროგრამა შეიძლება დაიწეროს ვექტორად. (50, 100, 10, 50, 150), რომელსაც აქვს ხუთი კომპონენტი.
აღნიშვნა. ვექტორები აღინიშნება სქელი პატარა ასოებით ან ასოებით ზევით ზოლით ან ისრით, მაგ. აან. ორ ვექტორს უწოდებენ თანაბარი, თუ მათ აქვთ კომპონენტების ერთნაირი რაოდენობა და მათი შესაბამისი კომპონენტები ტოლია.
ვექტორული კომპონენტების შეცვლა შეუძლებელია, მაგალითად, (3, 2, 5, 0, 1)და (2, 3, 5, 0, 1) სხვადასხვა ვექტორები.
ოპერაციები ვექტორებზე.Სამუშაო
x= (x 1 , x 2 , ... ,x n) რეალური რიცხვითλ ვექტორად წოდებულიλ x= (λ x 1, λ x 2, ..., λ x n).
თანხაx= (x 1 , x 2 , ... ,x n) და წ= (y 1 , y 2 , ... ,y n) ეწოდება ვექტორს x+y= (x 1 + y 1 , x 2 + y 2 , ... , x n + + y n).
ვექტორული სივრცე.ნ -განზომილებიანი ვექტორული სივრცე რ n განისაზღვრება, როგორც ყველა n-განზომილებიანი ვექტორის ერთობლიობა, რომლისთვისაც განსაზღვრულია რეალურ რიცხვებზე გამრავლების და შეკრების მოქმედებები.
ეკონომიკური ილუსტრაცია. n-განზომილებიანი ვექტორული სივრცის ეკონომიკური ილუსტრაცია: საქონლის სივრცე (საქონელი). ქვეშ საქონელიჩვენ გავიგებთ რაიმე საქონელს ან მომსახურებას, რომელიც გაყიდვაში გადის გარკვეულ დროს გარკვეულ ადგილას. დავუშვათ, რომ არსებობს სასრული რაოდენობა n ხელმისაწვდომი საქონლისა; მომხმარებლის მიერ შეძენილი თითოეული მათგანის რაოდენობა ხასიათდება საქონლის ნაკრებით
x= (x 1, x 2, ..., x n),
სადაც x i აღნიშნავს მომხმარებლის მიერ შეძენილი i-ე საქონლის რაოდენობას. ჩვენ ვივარაუდებთ, რომ ყველა საქონელს აქვს თვითნებური გაყოფის თვისება, ასე რომ შესაძლებელია თითოეული მათგანის ნებისმიერი არაუარყოფითი რაოდენობის შეძენა. მაშინ საქონლის ყველა შესაძლო ნაკრები არის საქონლის სივრცის ვექტორები C = ( x= (x 1 , x 2 , ... , x n) x i ≥ 0, i =).
ხაზოვანი დამოუკიდებლობა.
სისტემა ე 1 , ე 2 , ... , ე m n-განზომილებიანი ვექტორები ეწოდება წრფივად დამოკიდებული, თუ არის ასეთი რიცხვებიλ 1 , λ 2 , ... , λ m , რომელთაგან ერთი მაინც არ არის ნულოვანი, ისეთი, რომ ტოლიაλ 1 ე 1 + λ 2 ე 2 +... + λ მ ემ = 0; წინააღმდეგ შემთხვევაში, ვექტორთა ამ სისტემას ეწოდება წრფივი დამოუკიდებელი, ანუ მითითებული თანასწორობა შესაძლებელია მხოლოდ იმ შემთხვევაში, როდესაც ყველა ![]() . ვექტორების წრფივი დამოკიდებულების გეომეტრიული მნიშვნელობა რ 3, ინტერპრეტირებული, როგორც მიმართული სეგმენტები, განმარტეთ შემდეგი თეორემები.
. ვექტორების წრფივი დამოკიდებულების გეომეტრიული მნიშვნელობა რ 3, ინტერპრეტირებული, როგორც მიმართული სეგმენტები, განმარტეთ შემდეგი თეორემები.
თეორემა 1. ერთი ვექტორისგან შემდგარი სისტემა წრფივად არის დამოკიდებული თუ და მხოლოდ მაშინ, თუ ეს ვექტორი ნულის ტოლია.
თეორემა 2. იმისთვის, რომ ორი ვექტორი იყოს წრფივად დამოკიდებული, აუცილებელია და საკმარისია, რომ ისინი იყოს კოლინარული (პარალელური).
თეორემა 3 . იმისათვის, რომ სამი ვექტორი იყოს წრფივად დამოკიდებული, აუცილებელია და საკმარისია, რომ ისინი თანაპლანტარული იყოს (იყოს იმავე სიბრტყეში).
ვექტორების მარცხენა და მარჯვენა სამეული. არაერთობლივი ვექტორების სამმაგი ა, ბ, გდაურეკა უფლება, თუ დამკვირვებელი მათგან საერთო დასაწყისივექტორების ბოლოების გავლა ა, ბ, გმოცემული თანმიმდევრობით, როგორც ჩანს, ხდება საათის ისრის მიმართულებით. წინააღმდეგ შემთხვევაში ა, ბ, გ -დატოვა სამი. ვექტორების ყველა მარჯვენა (ან მარცხნივ) სამეულს უწოდებენ იგივე ორიენტირებული.
საფუძველი და კოორდინატები. ტროიკა ე 1, ე 2 , ე 3 არათანაბარი ვექტორი in რ 3 ჰქვია საფუძველიდა თავად ვექტორები ე 1, ე 2 , ე 3 - ძირითადი. ნებისმიერი ვექტორი აშეიძლება ცალსახად გაფართოვდეს საბაზისო ვექტორებად, ანუ წარმოდგენილი იყოს სახით
ა= x 1 ე 1+x2 ე 2 + x 3 ე 3, (1.1)
რიცხვები x 1 , x 2 , x 3 გაფართოებაში (1.1) ეწოდება კოორდინატებიასაფუძველში ე 1, ე 2 , ე 3 და დანიშნულია ა(x 1, x 2, x 3).
ორთონორალური საფუძველი. თუ ვექტორები ე 1, ე 2 , ე 3 არის წყვილი პერპენდიკულარული და თითოეული მათგანის სიგრძე ერთის ტოლია, მაშინ საფუძველი ე.წ. ორთონორმალურიდა კოორდინატები x 1 , x 2 , x 3 - მართკუთხა.ორთონორმალური საფუძვლის საბაზისო ვექტორები აღინიშნა მე, ჯ, კ.
ჩვენ ვივარაუდებთ, რომ სივრცეში რ 3 არჩეულია დეკარტის მართკუთხა კოორდინატების სწორი სისტემა (0, მე, ჯ, კ}.
ვექტორული ნამუშევარი. ვექტორული ნამუშევარი ავექტორამდე ბვექტორად წოდებული გ, რომელიც განისაზღვრება შემდეგი სამი პირობით:
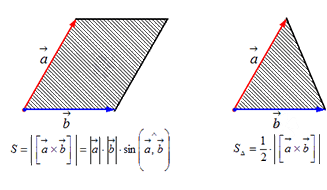
1. ვექტორის სიგრძე გრიცხობრივად ტოლია ვექტორებზე აგებული პარალელოგრამის ფართობის ადა ბ,ე.ი.
გ=
|ა||ბ|ცოდვა ( ა^ბ).
2. ვექტორი გთითოეული ვექტორის პერპენდიკულარული ადა ბ.
3. ვექტორები ა, ბდა გ, აღებული მითითებული თანმიმდევრობით, შექმენით მარჯვენა სამეული.
ჯვარედინი პროდუქტისთვის გაღნიშვნა შემოღებულია c =[აბ] ან
c = a
× ბ.
თუ ვექტორები ადა ბკოლინარულია, მერე ცოდო( a^b) = 0 და [ აბ] = 0, კერძოდ, [ აა] = 0. ერთეული ვექტორების ვექტორული ნამრავლები: [ იჯ]=კ, [ჯკ] = მე, [კი]=ჯ.
თუ ვექტორები ადა ბსაფუძველში მითითებული მე, ჯ, კკოორდინატები ა(a 1, a 2, a 3), ბ(b 1, b 2, b 3), შემდეგ

შერეული სამუშაო. თუ ორი ვექტორის ვექტორული ნამრავლი ადა ბსკალარულად გამრავლებული მესამე ვექტორზე გ,მაშინ სამი ვექტორის ასეთი ნამრავლი ეწოდება შერეული სამუშაოდა მითითებულია სიმბოლოთი ა ბ გ.
თუ ვექტორები ა, ბდა გსაფუძველში მე, ჯ, კმოცემულია მათი კოორდინატებით
ა(a 1, a 2, a 3), ბ(b 1, b 2, b 3), გ(c 1, c 2, c 3), შემდეგ
 .
.
შერეულ პროდუქტს აქვს მარტივი გეომეტრიული ინტერპრეტაცია - ეს არის სკალარი, რომელიც აბსოლუტური მნიშვნელობით უდრის სამ მოცემულ ვექტორზე აგებული პარალელეპიპედის მოცულობას.
თუ ვექტორები ქმნიან მარჯვენა სამეულს, მაშინ მათი შერეული სამუშაოარის დადებითი რიცხვი, რომელიც უდრის მითითებულ მოცულობას; თუ ეს სამია a, b, c -დატოვა, მაშინ ა ბ გ<0 и V = - ა ბ გ, შესაბამისად V =|ა ბ გ|.
ვექტორების კოორდინატები, რომლებიც გვხვდება პირველი თავის ამოცანებში, ვარაუდობენ, რომ მოცემულია სწორი ორთონორმალური საფუძვლის მიმართ. ერთეული ვექტორი ვექტორთან თანამიმართული A,მითითებულია სიმბოლოთი აო. სიმბოლო რ=OMაღინიშნება M წერტილის რადიუსის ვექტორით, სიმბოლოები a, AB ან|ა|, | AB|აღინიშნება ვექტორების მოდულები ადა AB.
მაგალითი 1.2. იპოვეთ კუთხე ვექტორებს შორის ა= 2მ+4ნდა ბ= მ-ნ, სად მდა n-ერთეული ვექტორები და შორის კუთხე მდა ნუდრის 120 o.
გამოსავალი. გვაქვს: cos φ = აბ/აბ ab =(2მ+4ნ) (მ-ნ) = 2მ 2 - 4ნ 2 +2წთ=
= 2 - 4+2cos120 o = - 2 + 2(-0.5) = -3; a = ; ა 2 = (2მ+4ნ) (2მ+4ნ) =
= 4მ 2 +16წთ+16ნ 2 = 4+16(-0.5)+16=12, რაც ნიშნავს a = . ბ = ; ბ 2 =
= (მ-ნ)(მ-ნ) = მ 2 -2წთ+ნ 2 =
1-2(-0.5)+1 = 3, რაც ნიშნავს b = . ბოლოს გვაქვს: cosφ = = -1/2, φ = 120 o.
მაგალითი 1.3.ვექტორების ცოდნა AB(-3,-2.6) და ძვ.წ.(-2,4,4), გამოთვალეთ ABC სამკუთხედის AD სიგრძის სიგრძე.
გამოსავალი. სამკუთხედის ABC ფართობის აღნიშვნა S-ით, მივიღებთ:
S = 1/2 BC AD. მერე AD=2S/BC, BC= = ![]() = 6,
= 6,
S = 1/2| AB ×AC|.
AC=AB+BC, რაც ნიშნავს ვექტორს A.C.აქვს კოორდინატები
.
.
მაგალითი 1.4 . მოცემულია ორი ვექტორი ა(11,10,2) და ბ(4,0,3). იპოვნეთ ერთეული ვექტორი გ,ორთოგონალური ვექტორების მიმართ ადა ბდა მიმართულია ისე, რომ ვექტორთა მოწესრიგებული სამმაგი ა, ბ, გმართალი იყო.
გამოსავალი.ავღნიშნოთ ვექტორის კოორდინატები გმოცემული უფლების ორთონორმალურ საფუძველთან დაკავშირებით x, y, z-ის მიხედვით.
Იმიტომ რომ გ ⊥ ა, გ ⊥ბ, ეს დაახლ= 0,კბ= 0. ამოცანის პირობების მიხედვით საჭიროა c = 1 და ა ბ გ >0.
ჩვენ გვაქვს განტოლების სისტემა x,y,z პოვნა: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
სისტემის პირველი და მეორე განტოლებიდან ვიღებთ z = -4/3 x, y = -5/6 x. y და z მესამე განტოლებაში ჩანაცვლებით, გვაქვს: x 2 = 36/125, საიდანაც
x =±
. პირობის გამოყენება a b c > 0, ვიღებთ უტოლობას

z და y გამონათქვამების გათვალისწინებით, მიღებულ უტოლობას გადავწერთ სახით: 625/6 x > 0, რაც გულისხმობს, რომ x>0. ასე რომ, x =, y = -, z =-.
Yandex.RTB R-A-339285-1სანამ ვექტორული ნამრავლის ცნებას მოვიყვანთ, მივმართოთ საკითხს a →, b →, c → ვექტორების მოწესრიგებული სამეულის ორიენტაციის შესახებ სამგანზომილებიან სივრცეში.
დასაწყისისთვის, ერთი წერტილიდან გამოვყოთ a → , b → , c → ვექტორები. სამმაგი a → , b → , c → ორიენტაცია შეიძლება იყოს მარჯვნივ ან მარცხნივ, რაც დამოკიდებულია თავად c → ვექტორის მიმართულებაზე. სამმაგი a → , b → , c → განისაზღვრება იმ მიმართულებით, რომლითაც უმოკლეს ბრუნი კეთდება a ვექტორიდან b → c → ვექტორის ბოლოდან.
თუ უმოკლეს შემობრუნება ხორციელდება საათის ისრის საწინააღმდეგოდ, მაშინ ვექტორების სამმაგი a → , b → , c → ე.წ. უფლებათუ საათის ისრის მიმართულებით - დატოვა.
შემდეგი, აიღეთ ორი არასწორხაზოვანი ვექტორი a → და b →. შემდეგ გამოვსახოთ ვექტორები A B → = a → და A C → = b → A წერტილიდან. ავაშენოთ ვექტორი A D → = c →, რომელიც ერთდროულად არის პერპენდიკულარული A B → და A C →. ამრიგად, თავად ვექტორის აგებისას A D → = c →, ჩვენ შეგვიძლია გავაკეთოთ ორი რამ, მივცეთ მას ერთი მიმართულება ან საპირისპირო (იხ. ილუსტრაცია).

ვექტორების მოწესრიგებული სამეული a → , b → , c → შეიძლება იყოს, როგორც გავარკვიეთ, მარჯვნივ ან მარცხნივ, ვექტორის მიმართულებიდან გამომდინარე.
ზემოაღნიშნულიდან შეგვიძლია შემოვიტანოთ ვექტორული პროდუქტის განმარტება. ეს განმარტება მოცემულია ორ ვექტორზე, რომლებიც განსაზღვრულია სამგანზომილებიანი სივრცის მართკუთხა კოორდინატულ სისტემაში.
განმარტება 1
ორი ვექტორის a → და b → ვექტორული ნამრავლი ჩვენ დავარქმევთ ისეთ ვექტორს, რომელიც განსაზღვრულია სამგანზომილებიანი სივრცის მართკუთხა კოორდინატულ სისტემაში, რომ:
- თუ a → და b → ვექტორები წრფივია, ის იქნება ნული;
- ის იქნება პერპენდიკულარული როგორც a → ვექტორის, ასევე b ვექტორის მიმართ, ე.ი. ∠ a → c → = ∠ b → c → = π 2;
- მისი სიგრძე განისაზღვრება ფორმულით: c → = a → · b → · sin ∠ a → , b → ;
- a → , b → , c → ვექტორების სამეულს იგივე ორიენტაცია აქვს, რაც მოცემულ კოორდინატულ სისტემას.
a → და b → ვექტორების ნამრავლს აქვს შემდეგი აღნიშვნა: a → × b →.
ვექტორული პროდუქტის კოორდინატები
ვინაიდან ნებისმიერ ვექტორს აქვს გარკვეული კოორდინატები კოორდინატთა სისტემაში, შეგვიძლია შემოვიტანოთ ვექტორული პროდუქტის მეორე განმარტება, რომელიც საშუალებას მოგვცემს ვიპოვოთ მისი კოორდინატები ვექტორების მოცემული კოორდინატების გამოყენებით.
განმარტება 2
სამგანზომილებიანი სივრცის მართკუთხა კოორდინატულ სისტემაში ორი ვექტორის ვექტორული ნამრავლი a → = (a x ; a y ; a z) და b → = (b x ; b y ; b z) ეწოდება ვექტორი c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , სადაც i → , j → , k → არის კოორდინატული ვექტორები.
ვექტორული ნამრავლი შეიძლება წარმოდგენილი იყოს როგორც მესამე რიგის კვადრატული მატრიცის განმსაზღვრელი, სადაც პირველი მწკრივი შეიცავს ვექტორებს i → , j → , k → , მეორე რიგი შეიცავს a → ვექტორის კოორდინატებს, ხოლო მესამე მწკრივს. შეიცავს b → ვექტორის კოორდინატებს მოცემულ მართკუთხა კოორდინატულ სისტემაში, ეს არის მატრიცის განმსაზღვრელი ასე გამოიყურება: c → = a → × b → = i → j → k → a x a y a z b x b y b z
ამ განმსაზღვრელი პირველი რიგის ელემენტებად გაფართოებით მივიღებთ ტოლობას: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z · i → - a x a z b x b z · j → + a x a y b x = → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
ჯვარედინი პროდუქტის თვისებები
ცნობილია, რომ ვექტორული ნამრავლი კოორდინატებში წარმოდგენილია როგორც c → = a → × b → = i → j → k → a x a y a z b x b y b z მატრიცის განმსაზღვრელი, შემდეგ საფუძველზე მატრიცის განმსაზღვრელი თვისებებინაჩვენებია შემდეგი ვექტორული პროდუქტის თვისებები:
- ანტიკომუტატიურობა a → × b → = - b → × a →;
- განაწილება a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → ან a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- ასოციაციურობა λ a → × b → = λ a → × b → ან a → × (λ b →) = λ a → × b →, სადაც λ არის თვითნებური რეალური რიცხვი.
ამ თვისებებს აქვს მარტივი მტკიცებულება.
მაგალითად, შეგვიძლია დავამტკიცოთ ვექტორული პროდუქტის ანტიკომუტაციური თვისება.
ანტიკომუტატიურობის მტკიცებულება
განმარტებით, a → × b → = i → j → k → a x a y a z b x b y b z და b → × a → = i → j → k → b x b y b z a x a y a z. და თუ მატრიცის ორი მწკრივი შეიცვალა, მაშინ მატრიცის განმსაზღვრელი მნიშვნელობა უნდა შეიცვალოს საპირისპიროდ, შესაბამისად, a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y - b → × a → , რაც და ადასტურებს, რომ ვექტორული ნამრავლი ანტიკომუტატიულია.
ვექტორული პროდუქტი - მაგალითები და გადაწყვეტილებები
უმეტეს შემთხვევაში, სამი სახის პრობლემაა.
პირველი ტიპის ამოცანებში, როგორც წესი, მოცემულია ორი ვექტორის სიგრძე და მათ შორის კუთხე და თქვენ უნდა იპოვოთ ვექტორული ნამრავლის სიგრძე. ამ შემთხვევაში გამოიყენეთ შემდეგი ფორმულა c → = a → · b → · sin ∠ a → , b → .
მაგალითი 1
იპოვეთ a → და b → ვექტორების ნამრავლის სიგრძე, თუ იცით a → = 3, b → = 5, ∠ a →, b → = π 4.
გამოსავალი
a → და b → ვექტორების ვექტორული ნამრავლის სიგრძის განსაზღვრით ვხსნით ამ ამოცანას: a → × b → = a → · b → · sin ∠ a → , b → = 3 · 5 · sin π 4 = 15 2 2 .
პასუხი: 15 2 2 .
მეორე ტიპის ამოცანებს აქვს კავშირი ვექტორების კოორდინატებთან, მათში ვექტორულ ნამრავლთან, მის სიგრძესთან და ა.შ. იძებნება მოცემული ვექტორების ცნობილი კოორდინატების მეშვეობით a → = (a x; a y; a z) და b → = (b x ; b y ; b z) .
ამ ტიპის პრობლემის გადასაჭრელად შეგიძლიათ ამოცანების მრავალი ვარიანტის გადაჭრა. მაგალითად, შეიძლება მითითებული იყოს არა a → და b → ვექტორების კოორდინატები, არამედ მათი გაფართოება ფორმის კოორდინატ ვექტორებად. b → = b x · i → + b y · j → + b z · k → და c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →, ან a → და b → ვექტორები შეიძლება დაზუსტდეს მათი დაწყების კოორდინატებით და ბოლო წერტილები.
განვიხილოთ შემდეგი მაგალითები.
მაგალითი 2
მართკუთხა კოორდინატულ სისტემაში მოცემულია ორი ვექტორი: a → = (2; 1; - 3), b → = (0; - 1; 1). იპოვეთ მათი ჯვარედინი პროდუქტი.
გამოსავალი
მეორე განმარტებით, ჩვენ ვპოულობთ ორი ვექტორის ნამრავლს მოცემულ კოორდინატებში: a → × b → = (a y · b z - a z · b y) · i → + (a z · b x - a x · b z) · j → + ( a x · b y - a y · b x) · k → = = (1 · 1 - (- 3) · (- 1)) · i → + ((- 3) · 0 - 2 · 1) · j → + (2 · (- 1) - 1 · 0) · k → = = - 2 i → - 2 j → - 2 k → .
თუ ვექტორულ ნამრავლს ჩავწერთ მატრიცის განმსაზღვრელი საშუალებით, მაშინ ამ მაგალითის ამოხსნა ასე გამოიყურება: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k →.
პასუხი: a → × b → = - 2 i → - 2 j → - 2 k →.
მაგალითი 3
იპოვეთ i → - j → და i → + j → + k → ვექტორების ნამრავლის სიგრძე, სადაც i →, j →, k → არის მართკუთხა დეკარტის კოორდინატთა სისტემის ერთეული ვექტორები.
გამოსავალი
ჯერ ვიპოვოთ მოცემული ვექტორული ნამრავლის კოორდინატები i → - j → × i → + j → + k → მოცემულ მართკუთხა კოორდინატულ სისტემაში.
ცნობილია, რომ i → - j → და i → + j → + k → ვექტორებს აქვთ კოორდინატები (1; - 1; 0) და (1; 1; 1). ვიპოვოთ ვექტორული ნამრავლის სიგრძე მატრიცის დეტერმინანტის გამოყენებით, შემდეგ გვაქვს i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
ამიტომ ვექტორულ ნამრავლს i → - j → × i → + j → + k → აქვს კოორდინატები (- 1 ; - 1 ; 2) მოცემულ კოორდინატულ სისტემაში.
ვექტორული ნამრავლის სიგრძეს ვპოულობთ ფორმულის გამოყენებით (იხ. განყოფილება ვექტორის სიგრძის პოვნის შესახებ): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6.
პასუხი: i → - j → × i → + j → + k → = 6 . .
მაგალითი 4
მართკუთხა დეკარტის კოორდინატულ სისტემაში მოცემულია სამი წერტილის A (1, 0, 1), B (0, 2, 3), C (1, 4, 2) კოორდინატები. იპოვნეთ A B → და A C → პერპენდიკულარული ვექტორი ერთდროულად.
გამოსავალი
A B → და A C → ვექტორებს აქვთ შემდეგი კოორდინატები (- 1 ; 2 ; 2) და (0 ; 4 ; 1) შესაბამისად. ვიპოვეთ A B → და A C → ვექტორების ვექტორული ნამრავლი, აშკარაა, რომ ის არის პერპენდიკულარული ვექტორი A B → და A C →, ანუ ეს არის ჩვენი პრობლემის გადაწყვეტა. ვიპოვოთ A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k →.
პასუხი: - 6 i → + j → - 4 k → . - ერთ-ერთი პერპენდიკულარული ვექტორი.
მესამე ტიპის ამოცანები ფოკუსირებულია ვექტორების ვექტორული ნამრავლის თვისებების გამოყენებაზე. რომლის გამოყენების შემდეგ ჩვენ მივიღებთ მოცემული პრობლემის გადაწყვეტას.
მაგალითი 5
ვექტორები a → და b → პერპენდიკულურია და მათი სიგრძეა, შესაბამისად, 3 და 4. იპოვეთ ვექტორული ნამრავლის სიგრძე 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → .
გამოსავალი
ვექტორული ნამრავლის გამანაწილებელი თვისებით შეგვიძლია დავწეროთ 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3. a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
ასოციაციურობის თვისებით ვიღებთ ციფრულ კოეფიციენტებს ბოლო გამოსახულებაში ვექტორული ნამრავლების ნიშნიდან: 3 · a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → = = 3 · a → × a → + 3 · (- 2) · a → × b → + (- 1) · b → × a → + (- 1) · (- 2) · b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
ვექტორული ნამრავლები a → × a → და b → × b → ტოლია 0-ის, ვინაიდან a → × a → = a → · a → · sin 0 = 0 და b → × b → = b → · b → · sin 0 = 0, შემდეგ 3 · a → × a → - 6 · a → × b → - b → × a → + 2 · b → × b → = - 6 · a → × b → - b → × a →. .
ვექტორული ნამრავლის ანტიკომუტატიურობიდან გამომდინარეობს - 6 · a → × b → - b → × a → = - 6 · a → × b → - (- 1) · a → × b → = - 5 · a → × ბ → . .
ვექტორული ნამრავლის თვისებების გამოყენებით ვიღებთ ტოლობას 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
პირობით, a → და b → ვექტორები პერპენდიკულარულია, ანუ მათ შორის კუთხე უდრის π 2-ს. ახლა რჩება მხოლოდ ნაპოვნი მნიშვნელობების ჩანაცვლება შესაბამის ფორმულებში: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → · sin (a → , b →) = 5 · 3 · 4 · sin π 2 = 60 .
პასუხი: 3 a → - b → × a → - 2 b → = 60.
ვექტორების ვექტორული ნამრავლის სიგრძე განსაზღვრებით უდრის a → × b → = a → · b → · sin ∠ a → , b → . ვინაიდან უკვე ცნობილია (საიდან სკოლის კურსი) რომ სამკუთხედის ფართობი უდრის მისი ორი გვერდის სიგრძის ნამრავლის ნახევარს, გამრავლებული ამ გვერდებს შორის კუთხის სინუსზე. ამრიგად, ვექტორული ნამრავლის სიგრძე უდრის პარალელოგრამის ფართობს - გაორმაგებული სამკუთხედი, კერძოდ, გვერდების ნამრავლი a → და b → ვექტორების სახით, რომლებიც ჩამოყალიბებულია ერთი წერტილიდან, სინუსით. მათ შორის კუთხე sin ∠ a →, b →.
ეს არის ვექტორული პროდუქტის გეომეტრიული მნიშვნელობა.
ვექტორული პროდუქტის ფიზიკური მნიშვნელობა
მექანიკაში, ფიზიკის ერთ-ერთ ფილიალში, ვექტორული პროდუქტის წყალობით, თქვენ შეგიძლიათ განსაზღვროთ ძალის მომენტი სივრცის წერტილთან შედარებით.
განმარტება 3
ძალის F → გამოყენებული B წერტილზე, A წერტილთან მიმართებაში, ჩვენ გავიგებთ შემდეგ ვექტორულ ნამრავლს A B → × F →.
თუ შეამჩნევთ შეცდომას ტექსტში, მონიშნეთ იგი და დააჭირეთ Ctrl+Enter
ერთეული ვექტორი- ეს ვექტორი, აბსოლუტური მნიშვნელობა(მოდული) რომლის ტოლია ერთი. ერთეული ვექტორის აღსანიშნავად გამოვიყენებთ ქვესკრიპტს e. ასე რომ, თუ მოცემულია ვექტორი ა, მაშინ მისი ერთეული ვექტორი იქნება ვექტორი აე) ეს ერთეული ვექტორი მიმართულია იმავე მიმართულებით, როგორც თავად ვექტორი ადა მისი მოდული უდრის ერთს, ანუ e = 1.
ცხადია, ა= ა აე (ა - ვექტორული მოდული ა). ეს გამომდინარეობს წესიდან, რომლითაც სრულდება სკალარის ვექტორზე გამრავლების ოპერაცია.
ერთეული ვექტორებიხშირად ასოცირდება კოორდინატთა სისტემის კოორდინატებთან (კერძოდ, დეკარტის კოორდინატთა სისტემის ღერძებთან). ამ მიმართულებები ვექტორებიემთხვევა შესაბამისი ღერძების მიმართულებებს და მათი საწყისი ხშირად შერწყმულია კოორდინატთა სისტემის საწყისთან.
ნება მომეცით შეგახსენოთ დეკარტის კოორდინატთა სისტემასივრცეში ტრადიციულად უწოდებენ ორმხრივ პერპენდიკულარულ ღერძებს, რომლებიც იკვეთებიან წერტილში, რომელსაც ეწოდება კოორდინატების საწყისი. კოორდინატების ღერძები ჩვეულებრივ აღინიშნება ასოებით X, Y, Z და ეწოდება აბსცისის ღერძი, ორდინატთა ღერძი და აპლიკაციის ღერძი. თავად დეკარტმა გამოიყენა მხოლოდ ერთი ღერძი, რომელზეც აბსციები იყო გამოსახული. გამოყენების ღირსება სისტემებიცულები მის მოსწავლეებს ეკუთვნის. ამიტომ ფრაზა კარტეზიული სისტემაკოორდინატებიისტორიულად არასწორი. ჯობია ვილაპარაკოთ მართკუთხა კოორდინატთა სისტემაან ორთოგონალური კოორდინატთა სისტემა. თუმცა, ჩვენ არ შევცვლით ტრადიციებს და მომავალში ვივარაუდებთ, რომ დეკარტისა და მართკუთხა (ორთოგონალური) კოორდინატთა სისტემები ერთი და იგივეა.
ერთეული ვექტორი, მიმართულია X ღერძის გასწვრივ, აღინიშნება მე, ერთეული ვექტორი, მიმართული Y ღერძის გასწვრივ, აღინიშნება ჯ, ა ერთეული ვექტორი, მიმართულია Z ღერძის გასწვრივ, აღინიშნება კ. ვექტორები მე, ჯ, კუწოდებენ ორტები(ნახ. 12, მარცხნივ), აქვთ ერთი მოდული, ე.ი
i = 1, j = 1, k = 1.
ცულები და ერთეული ვექტორები მართკუთხა კოორდინატთა სისტემაზოგიერთ შემთხვევაში მათ აქვთ სხვადასხვა სახელები და აღნიშვნები. ამრიგად, აბსცისის ღერძს X შეიძლება ეწოდოს ტანგენტის ღერძი და მისი ერთეული ვექტორი აღინიშნება τ (ბერძნული პატარა ასო ტაუ), ორდინატთა ღერძი ნორმალური ღერძია, მისი ერთეული ვექტორი აღინიშნება. ნ, აპლიკაციური ღერძი არის ბინორმალური ღერძი, მისი ერთეული ვექტორი აღინიშნება ბ. რატომ იცვლება სახელები, თუ არსი იგივე რჩება?
ფაქტია, რომ, მაგალითად, მექანიკაში, სხეულების მოძრაობის შესწავლისას, ძალიან ხშირად გამოიყენება მართკუთხა კოორდინატთა სისტემა. ასე რომ, თუ კოორდინატთა სისტემა თავისთავად სტაციონარულია და მოძრავი ობიექტის კოორდინატების ცვლილება აღირიცხება ამ სტაციონარულ სისტემაში, მაშინ ჩვეულებრივ ღერძებს ნიშნავენ X, Y, Z და მათ. ერთეული ვექტორებიშესაბამისად მე, ჯ, კ.
მაგრამ ხშირად, როდესაც ობიექტი მოძრაობს რაიმე სახის მრუდი ბილიკზე (მაგალითად, წრეში), უფრო მოსახერხებელია ამ ობიექტთან მოძრავი კოორდინატთა სისტემაში მექანიკური პროცესების განხილვა. სწორედ ასეთი მოძრავი კოორდინატთა სისტემისთვის გამოიყენება ღერძების სხვა სახელები და მათი ერთეული ვექტორები. უბრალოდ ასეა. ამ შემთხვევაში, X ღერძი მიმართულია ტანგენციურად იმ ტრაექტორიაზე, სადაც მდებარეობს ამ მომენტშიეს ობიექტი მდებარეობს. და მაშინ ამ ღერძს აღარ ეძახიან X ღერძი, არამედ ტანგენტის ღერძი და მისი ერთეული ვექტორი აღარ არის დანიშნული მე, ა τ . Y ღერძი მიმართულია ტრაექტორიის გამრუდების რადიუსის გასწვრივ (წრეში მოძრაობის შემთხვევაში - წრის ცენტრამდე). და რადგან რადიუსი ტანგენტის პერპენდიკულარულია, ღერძს ნორმალური ღერძი ეწოდება (პერპენდიკულარული და ნორმალური ერთი და იგივეა). ამ ღერძის ერთეული ვექტორი აღარ აღინიშნება ჯ, ა ნ. მესამე ღერძი (ადრე Z) პერპენდიკულარულია წინა ორზე. ეს ბინორმაა ორთით ბ(სურ. 12, მარჯვნივ). სხვათა შორის, ამ შემთხვევაში ასეთი მართკუთხა კოორდინატთა სისტემახშირად მოიხსენიებენ როგორც "ბუნებრივ" ან ბუნებრივ.
განმარტება. ვექტორის ნამრავლი a (გამრავლება) და არაკოლნეარული ვექტორის (გამრავლება) არის მესამე ვექტორი c (პროდუქტი), რომელიც აგებულია შემდეგნაირად:
1) მისი მოდული რიცხობრივად უდრის პარალელოგრამის ფართობს ნახ. 155), აგებულია ვექტორებზე, ანუ ტოლია აღნიშნული პარალელოგრამის სიბრტყის პერპენდიკულარული მიმართულებისა;
3) ამ შემთხვევაში, c ვექტორის მიმართულება არჩეულია (ორი შესაძლოდან) ისე, რომ ვექტორები ქმნიან მარჯვენა სისტემას (§ 110).
აღნიშვნა: ან
განმარტების დამატება. თუ ვექტორები კოლინარულია, მაშინ ფიგურის (პირობითად) პარალელოგრამის გათვალისწინებით, ბუნებრივია ნულოვანი ფართობის მინიჭება. მაშასადამე, კოლინარული ვექტორების ვექტორული ნამრავლი ითვლება ნულოვანი ვექტორის ტოლად.

ვინაიდან ნულ ვექტორს შეიძლება მიენიჭოს ნებისმიერი მიმართულება, ეს შეთანხმება არ ეწინააღმდეგება განმარტების მე-2 და მე-3 პუნქტებს.
შენიშვნა 1. ტერმინში „ვექტორული ნამრავლი“ პირველი სიტყვა მიუთითებს, რომ მოქმედების შედეგი არის ვექტორი (განსხვავებით სკალარული ნამრავლი; შდრ. § 104, შენიშვნა 1).
მაგალითი 1. იპოვეთ ვექტორული ნამრავლი, სადაც არის სწორი კოორდინატთა სისტემის ძირითადი ვექტორები (სურ. 156).
1. ვინაიდან ძირითადი ვექტორების სიგრძე უდრის ერთი მასშტაბის ერთეულს, პარალელოგრამის (კვადრატის) ფართობი რიცხობრივად ერთის ტოლია. ეს ნიშნავს, რომ ვექტორული ნამრავლის მოდული ერთის ტოლია.
2. ვინაიდან სიბრტყეზე პერპენდიკულარული არის ღერძი, სასურველი ვექტორული ნამრავლი არის ვექტორი k ვექტორის კოლინარული; და რადგან ორივე მათგანს აქვს მოდული 1, სასურველი ვექტორული ნამრავლი უდრის k ან -k.
3. ამ ორი შესაძლო ვექტორიდან უნდა ავირჩიოთ პირველი, ვინაიდან k ვექტორები ქმნიან მემარჯვენე სისტემას (ხოლო ვექტორები მემარცხენე).
მაგალითი 2. იპოვეთ ჯვარედინი ნამრავლი
გამოსავალი. როგორც 1-ელ მაგალითში, დავასკვნათ, რომ ვექტორი ტოლია k ან -k. მაგრამ ახლა ჩვენ უნდა ავირჩიოთ -k, რადგან ვექტორები ქმნიან მარჯვენა სისტემას (და ვექტორები ქმნიან მარცხენა სისტემას). Ისე,
მაგალითი 3. ვექტორებს აქვთ სიგრძე, შესაბამისად 80 და 50 სმ-ის ტოლი და ქმნიან კუთხეს 30°. მეტრის სიგრძის ერთეულად აიღეთ ვექტორული ნამრავლის სიგრძე a

გამოსავალი. ვექტორებზე აგებული პარალელოგრამის ფართობი ტოლია სასურველი ვექტორული ნამრავლის სიგრძე უდრის
მაგალითი 4. იპოვეთ იგივე ვექტორების ვექტორული ნამრავლის სიგრძე, აიღეთ სანტიმეტრი სიგრძის ერთეულით.
გამოსავალი. ვინაიდან ვექტორებზე აგებული პარალელოგრამის ფართობი ტოლია, ვექტორული ნამრავლის სიგრძე უდრის 2000 სმ, ე.ი.
მე-3 და მე-4 მაგალითების შედარებიდან ირკვევა, რომ ვექტორის სიგრძე დამოკიდებულია არა მხოლოდ ფაქტორების სიგრძეზე, არამედ სიგრძის ერთეულის არჩევანზეც.
ვექტორული პროდუქტის ფიზიკური მნიშვნელობა.ვექტორული ნამრავლით წარმოდგენილი მრავალი ფიზიკური სიდიდედან განვიხილავთ მხოლოდ ძალის მომენტს.
ვთქვათ A არის ძალის გამოყენების წერტილი. O წერტილთან მიმართებით ძალის მომენტს ეწოდება ვექტორული ნამრავლი. ვინაიდან ამ ვექტორული ნამრავლის მოდული რიცხობრივად უდრის პარალელოგრამის ფართობს (ნახ. 157), მაშინ მომენტის მოდული უდრის ფუძისა და სიმაღლის ნამრავლს, ანუ ძალა გამრავლებული მანძილით O წერტილიდან სწორ ხაზამდე, რომლის გასწვრივაც მოქმედებს ძალა.
მექანიკაში დამტკიცებულია, რომ წონასწორობისთვის მყარიაუცილებელია, რომ არა მხოლოდ ვექტორების ჯამი, რომლებიც წარმოადგენენ სხეულზე მიმართული ძალების, იყოს ნულის ტოლი, არამედ ძალების მომენტების ჯამიც. იმ შემთხვევაში, როდესაც ყველა ძალა პარალელურია ერთი სიბრტყის პარალელურად, ვექტორების დამატება, რომლებიც წარმოადგენენ მომენტებს, შეიძლება შეიცვალოს მათი სიდიდეების შეკრებითა და გამოკლებით. მაგრამ ძალების თვითნებური მიმართულებებით, ასეთი ჩანაცვლება შეუძლებელია. ამის შესაბამისად, ვექტორული ნამრავლი განისაზღვრება ზუსტად როგორც ვექტორი და არა როგორც რიცხვი.

7.1. ჯვარედინი პროდუქტის განმარტება
სამი არაერთობლივი ვექტორი a, b და c, აღებული მითითებული თანმიმდევრობით, ქმნის მარჯვენა სამეულს, თუ მესამე ვექტორის ბოლოდან c-ის ბოლოდან ჩანს უმოკლესი ბრუნი პირველი a ვექტორიდან მეორე ვექტორამდე b. იყოს საათის ისრის საწინააღმდეგოდ, ხოლო მარცხენა სამეული თუ საათის ისრის მიმართულებით (იხ. სურ. 16).
ვექტორის a და ვექტორის ვექტორულ ნამრავლს ეწოდება c ვექტორი, რომელიც:
1. a და b ვექტორების პერპენდიკულარული, ანუ c ^ a და c ^ ბ ;
2. აქვს სიგრძე რიცხობრივად ტოლი a და ვექტორებზე აგებული პარალელოგრამის ფართობისბროგორც გვერდებზე (იხ. სურ. 17), ე.ი.
3. a, b და c ვექტორები ქმნიან მარჯვენა სამეულს.


ჯვარედინი ნამრავლი აღინიშნება x b ან [a,b]. შემდეგი ურთიერთობები ერთეულ ვექტორებს შორის i პირდაპირ გამომდინარეობს ვექტორული ნამრავლის განმარტებიდან, ჯდა კ(იხ. სურ. 18):
i x j = k, j x k = i, k x i = j.
მოდით დავამტკიცოთ, რომ მაგალითადმე xj =k.
1) კ ^ ი, კ ^ j ;
2) |k |=1, მაგრამ | მე x ჯ| = |i | |J | sin(90°)=1;
3) ვექტორები i, j და კშექმენით მარჯვენა სამეული (იხ. სურ. 16).
7.2. ჯვარედინი პროდუქტის თვისებები
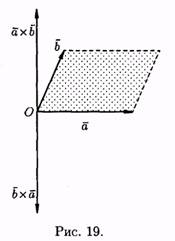
1. ფაქტორების გადაწყობისას ვექტორული ნამრავლი ცვლის ნიშანს, ე.ი. და xb =(b xa) (იხ. სურ. 19).
ვექტორები a xb და b xa არის კოლინარული, აქვთ იგივე მოდულები (პარალელოგრამის ფართობი უცვლელი რჩება), მაგრამ საპირისპიროა მიმართული (სამმაგი a, b, a xb და a, b, b x a საპირისპირო ორიენტაციის). ანუ axb = -(b xa).
2. ვექტორულ პროდუქტს აქვს კომბინირების თვისება სკალარული ფაქტორის მიმართ, ანუ l (a xb) = (l a) x b = a x (l b).
მოდით l >0. ვექტორი l (a xb) არის a და b ვექტორების პერპენდიკულარული. ვექტორი ( ლნაჯახი ბასევე არის a და ვექტორების პერპენდიკულარული ბ(ვექტორები a, ლმაგრამ დაწექი იმავე სიბრტყეში). ეს ნიშნავს, რომ ვექტორები ლ(a xb) და ( ლნაჯახი ბკოლინარული. აშკარაა, რომ მათი მიმართულებები ერთმანეთს ემთხვევა. მათ აქვთ იგივე სიგრძე:
Ამიტომაც ლ(a xb)= ლ xb. ეს დადასტურებულია მსგავსი გზით ლ<0.
3. ორი არანულოვანი ვექტორი a და ბარიან კოლინარული, თუ და მხოლოდ მაშინ, თუ მათი ვექტორული ნამრავლი ტოლია ნულოვანი ვექტორის, ანუ a ||b<=>და xb =0.

კერძოდ, i *i =j *j =k *k =0 .
4. ვექტორულ პროდუქტს აქვს განაწილების თვისება:
(ა+ბ) xc = a xc + ბ xs.
ჩვენ მივიღებთ მტკიცებულების გარეშე.
7.3. ჯვარედინი ნამრავლის გამოხატვა კოორდინატების მიხედვით
ჩვენ გამოვიყენებთ i ვექტორების ჯვარედინი ნამრავლის ცხრილს, ჯდა კ:

თუ პირველი ვექტორიდან მეორემდე უმოკლესი ბილიკის მიმართულება ემთხვევა ისრის მიმართულებას, მაშინ ნამრავლი უდრის მესამე ვექტორს, თუ არ ემთხვევა, მესამე ვექტორი აღებულია მინუს ნიშნით.
მიეცით ორი ვექტორი a =a x i +a y ჯ+a z კდა b =b x მე+b y ჯ+b z კ. ვიპოვოთ ამ ვექტორების ვექტორული ნამრავლი მათი მრავალწევრების გამრავლებით (ვექტორული ნამრავლის თვისებების მიხედვით):

![]()
შედეგად მიღებული ფორმულა შეიძლება კიდევ უფრო მოკლედ დაიწეროს:

ვინაიდან ტოლობის მარჯვენა მხარე (7.1) შეესაბამება მესამე რიგის დეტერმინანტის გაფართოებას პირველი რიგის ელემენტების მიხედვით.ტოლობა (7.2) ადვილად დასამახსოვრებელია.
7.4. ჯვარედინი პროდუქტის ზოგიერთი გამოყენება
ვექტორების კოლინარობის დადგენა

პარალელოგრამისა და სამკუთხედის ფართობის პოვნა
ვექტორთა ვექტორული ნამრავლის განმარტების მიხედვით ადა ბ |a xb | =|ა | * |b |sin g, ანუ S წყვილი = |a x b |. და, შესაბამისად, D S =1/2|a x b |.
ძალის მომენტის განსაზღვრა წერტილის შესახებ
მიეცით ძალა A წერტილში F =ABგაუშვი შესახებ- რაღაც წერტილი სივრცეში (იხ. სურ. 20).

ფიზიკიდან ცნობილია, რომ ძალის მომენტი ფ პუნქტთან შედარებით შესახებვექტორად წოდებული მ,რომელიც გადის წერტილში შესახებდა:
1) წერტილებში გამავალი სიბრტყის პერპენდიკულარული O, A, B;
2) რიცხობრივად ტოლია ძალის ნამრავლის მკლავზე
3) ქმნის მარჯვენა სამეულს OA და A B ვექტორებით.
ამიტომ, M = OA x F.
წრფივი ბრუნვის სიჩქარის პოვნა
სიჩქარე ვკუთხური სიჩქარით მბრუნავი ხისტი სხეულის წერტილი M ვფიქსირებული ღერძის გარშემო, განისაზღვრება ეილერის ფორმულით v =w xr, სადაც r =OM, სადაც O არის ღერძის ზოგიერთი ფიქსირებული წერტილი (იხ. სურ. 21).
