Modul vektorskog proizvoda dva vektora je jednak. Unakrsni proizvod - definicije, svojstva, formule, primjeri i rješenja
Definicija Uređena kolekcija (x 1 , x 2 , ... , x n) n realnih brojeva naziva se n-dimenzionalni vektor, i brojevi x i (i = ) - komponente, ili koordinate,
Primjer. Ako, na primjer, određeni pogon automobila mora proizvesti 50 automobila, 100 kamiona, 10 autobusa, 50 kompleta rezervnih dijelova za automobile i 150 kompleta za kamione i autobuse po smjeni, onda se proizvodni program ovog pogona može napisati kao vektor (50, 100, 10, 50, 150), sa pet komponenti.
Notacija. Vektori su označeni podebljanim malim slovima ili slovima sa trakom ili strelicom na vrhu, npr. a ili. Dva vektora se nazivaju jednaka, ako imaju isti broj komponenti i njihove odgovarajuće komponente su jednake.
Vektorske komponente se ne mogu zamijeniti, na primjer, (3, 2, 5, 0, 1) i (2, 3, 5, 0, 1) različiti vektori.
Operacije na vektorima. Posao
x= (x 1 , x 2 , ... ,x n) realnim brojemλ zove se vektorλ x= (λ x 1, λ x 2, ..., λ x n).
Iznosx= (x 1 , x 2 , ... ,x n) i y= (y 1 , y 2 , ... ,y n) naziva se vektor x+y= (x 1 + y 1 , x 2 + y 2 , ... , x n + + y n).
Vektorski prostor. N -dimenzionalni vektorski prostor R n je definiran kao skup svih n-dimenzionalnih vektora za koje su definirane operacije množenja realnim brojevima i sabiranja.
Ekonomska ilustracija. Ekonomska ilustracija n-dimenzionalnog vektorskog prostora: prostor robe (robe). Ispod robe razumećemo neku robu ili uslugu koja se prodaje u određeno vreme na određenom mestu. Pretpostavimo da postoji konačan broj n dostupnih dobara; količine svakog od njih koje potrošač kupuje karakteriše skup robe
x= (x 1 , x 2 , ..., x n),
gdje x i označava količinu i-te robe koju je kupio potrošač. Pretpostavit ćemo da sva dobra imaju svojstvo proizvoljne djeljivosti, tako da se može kupiti bilo koja nenegativna količina svakog od njih. Tada su svi mogući skupovi dobara vektori prostora roba C = ( x= (x 1 , x 2 , ... , x n) x i ≥ 0, i = ).
Linearna nezavisnost.
Sistem e 1 , e 2 , ... , e m n-dimenzionalni vektori se nazivaju linearno zavisna, ako postoje takvi brojeviλ 1 , λ 2 , ... , λ m , od kojih je barem jedan različit od nule, tako da je jednakostλ 1 e 1 + λ 2 e 2 +... + λ m e m = 0; inače, ovaj sistem vektora se naziva linearno nezavisna, odnosno naznačena jednakost je moguća samo u slučaju kada su svi ![]() . Geometrijsko značenje linearne zavisnosti vektora u R 3, interpretirani kao usmjereni segmenti, objašnjavaju sljedeće teoreme.
. Geometrijsko značenje linearne zavisnosti vektora u R 3, interpretirani kao usmjereni segmenti, objašnjavaju sljedeće teoreme.
Teorema 1. Sistem koji se sastoji od jednog vektora je linearno zavisan ako i samo ako je ovaj vektor nula.
Teorema 2. Da bi dva vektora bila linearno zavisna, potrebno je i dovoljno da budu kolinearni (paralelni).
Teorema 3 . Da bi tri vektora bila linearno zavisna, potrebno je i dovoljno da budu koplanarni (leže u istoj ravni).
Lijeve i desne trojke vektora. Trojka nekoplanarnih vektora a, b, c pozvao u pravu, ako je posmatrač od njih zajednički početak prelazeći krajeve vektora a, b, c u datom redosledu se pojavljuje u smeru kazaljke na satu. Inače a, b, c -lijevo tri. Zovu se sve desne (ili lijeve) trojke vektora isto orijentisan.
Osnova i koordinate. Trojka e 1, e 2 , e 3 nekoplanarna vektora u R 3 se zove osnovu, i sami vektori e 1, e 2 , e 3 - osnovni. Bilo koji vektor a mogu se jedinstveno proširiti u bazne vektore, odnosno predstaviti u obliku
A= x 1 e 1+x2 e 2 + x 3 e 3, (1.1)
pozivaju se brojevi x 1 , x 2 , x 3 u ekspanziji (1.1). koordinatea u osnovi e 1, e 2 , e 3 i označeni su a(x 1, x 2, x 3).
Ortonormalna osnova. Ako vektori e 1, e 2 , e 3 su u paru okomite i dužina svakog od njih jednaka je jedan, tada se baza naziva ortonormalno, a koordinate x 1 , x 2 , x 3 - pravougaona. Bazni vektori ortonormalne baze će biti označeni sa i, j, k.
Pretpostavićemo to u svemiru R 3 je odabran pravi sistem kartezijanskih pravokutnih koordinata (0, i, j, k}.
Vector artwork. Vector artwork A na vektor b zove se vektor c, što je određeno sljedeća tri uslova:
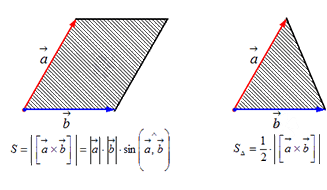
1. Dužina vektora c brojčano jednak površini paralelograma izgrađenog na vektorima a I b, tj.
c=
|a||b| grijeh( a^b).
2. Vektor c okomito na svaki od vektora a I b.
3. Vektori a, b I c, uzeti navedenim redoslijedom, čine desnu trojku.
Za unakrsni proizvod c uvodi se oznaka c =[ab] ili
c = a
× b.
Ako vektori a I b su kolinearni, onda sin( a^b) = 0 i [ ab] = 0, posebno [ aa] = 0. Vektorski produkti jediničnih vektora: [ ij]=k, [jk] = i, [ki]=j.
Ako vektori a I b navedeno u osnovi i, j, k koordinate a(a 1, a 2, a 3), b(b 1, b 2, b 3), onda

Mješoviti posao. Ako je vektorski proizvod dva vektora A I b skalarno pomnoženo trećim vektorom c, onda se takav proizvod tri vektora naziva mješoviti rad i označen je simbolom a b c.
Ako vektori a, b I c u osnovi i, j, k date njihovim koordinatama
a(a 1, a 2, a 3), b(b 1, b 2, b 3), c(c 1, c 2, c 3), onda
 .
.
Mješoviti proizvod ima jednostavnu geometrijsku interpretaciju - to je skalar, jednak po apsolutnoj vrijednosti volumenu paralelepipeda izgrađenog na tri data vektora.
Ako vektori formiraju desnu trojku, onda je njihov mješoviti rad postoji pozitivan broj jednak navedenoj zapremini; ako je trojka a, b, c - lijevo, onda a b c<0 и V = - a b c, dakle V =|a b c|.
Pretpostavlja se da su koordinate vektora na koje se susrećemo u problemima iz prvog poglavlja date u odnosu na desnu ortonormalnu osnovu. Jedinični vektor kosmjeran s vektorom A, označeno simbolom A O. Simbol r=OM označeno radijus vektorom tačke M, simbolima a, AB ili|a|, | AB|moduli vektora su označeni A I AB.
Primjer 1.2. Pronađite ugao između vektora a= 2m+4n I b= m-n, Gdje m I n- jedinični vektori i ugao između m I n jednako 120 o.
Rješenje. Imamo: cos φ = ab/ab ab =(2m+4n) (m-n) = 2m 2 - 4n 2 +2mn=
= 2 - 4+2cos120 o = - 2 + 2(-0,5) = -3; a = ; a 2 = (2m+4n) (2m+4n) =
= 4m 2 +16mn+16n 2 = 4+16(-0,5)+16=12, što znači a = . b = ; b 2 =
= (m-n)(m-n) = m 2 -2mn+n 2 =
1-2(-0,5)+1 = 3, što znači b = . Konačno imamo: cosφ = = -1/2, φ = 120 o.
Primjer 1.3.Poznavanje vektora AB(-3,-2.6) i B.C.(-2,4,4),izračunaj dužinu visine AD trougla ABC.
Rješenje. Označavajući površinu trokuta ABC sa S, dobijamo:
S = 1/2 pne. Onda AD=2S/BC, BC= = ![]() = 6,
= 6,
S = 1/2| AB ×AC|.
AC=AB+BC, što znači vektor A.C. ima koordinate
.
.
Primjer 1.4 . Data su dva vektora a(11,10,2) i b(4,0,3). Pronađite jedinični vektor c, ortogonalno na vektore a I b i usmjerena tako da uređena trojka vektora a, b, c bio u pravu.
Rješenje.Označimo koordinate vektora c s obzirom na datu desnu ortonormiranu bazu u terminima x, y, z.
Zbog c ⊥ a, c ⊥b, To ca= 0,cb= 0. Prema uslovima zadatka, potrebno je da je c = 1 i a b c >0.
Imamo sistem jednačina za nalaženje x,y,z: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
Iz prve i druge jednačine sistema dobijamo z = -4/3 x, y = -5/6 x. Zamjenom y i z u treću jednačinu imamo: x 2 = 36/125, odakle
x =±
. Koristeći uslov a b c > 0, dobijamo nejednakost

Uzimajući u obzir izraze za z i y, rezultujuću nejednakost prepisujemo u obliku: 625/6 x > 0, što implicira da je x>0. Dakle, x = , y = - , z =- .
Yandex.RTB R-A-339285-1Prije nego damo pojam vektorskog proizvoda, osvrnimo se na pitanje orijentacije uređene trojke vektora a →, b →, c → u trodimenzionalnom prostoru.
Za početak, odvojimo vektore a → , b → , c → iz jedne tačke. Orijentacija trojke a → , b → , c → može biti desna ili lijeva, ovisno o smjeru samog vektora c →. Tip trojke a → , b → , c → odredit će se iz smjera u kojem se pravi najkraći okret od vektora a → do b → od kraja vektora c → .
Ako se najkraći okret izvede suprotno od kazaljke na satu, tada se trojka vektora a → , b → , c → naziva u pravu, ako je u smjeru kazaljke na satu – lijevo.
Zatim uzmite dva nekolinearna vektora a → i b →. Nacrtajmo onda vektore A B → = a → i A C → = b → iz tačke A. Konstruirajmo vektor A D → = c →, koji je istovremeno okomit i na A B → i na A C →. Dakle, kada konstruišemo sam vektor A D → = c →, možemo uraditi dve stvari, dajući mu ili jedan ili suprotan smer (vidi ilustraciju).

Uređena trojka vektora a → , b → , c → može, kako smo saznali, biti desna ili leva u zavisnosti od smera vektora.
Iz navedenog možemo uvesti definiciju vektorskog proizvoda. Ova definicija je data za dva vektora definisana u pravougaonom koordinatnom sistemu trodimenzionalnog prostora.
Definicija 1
Vektorski proizvod dva vektora a → i b → nazvat ćemo takav vektor definiran u pravokutnom koordinatnom sistemu trodimenzionalnog prostora tako da:
- ako su vektori a → i b → kolinearni, biće nula;
- bit će okomit na vektor a → i vektor b → tj. ∠ a → c → = ∠ b → c → = π 2 ;
- njegova dužina je određena formulom: c → = a → · b → · sin ∠ a → , b → ;
- trojka vektora a → , b → , c → ima istu orijentaciju kao dati koordinatni sistem.
Vektorski proizvod vektora a → i b → ima sljedeću notaciju: a → × b →.
Koordinate vektorskog proizvoda
Pošto svaki vektor ima određene koordinate u koordinatnom sistemu, možemo uvesti drugu definiciju vektorskog proizvoda, koja će nam omogućiti da pronađemo njegove koordinate koristeći date koordinate vektora.
Definicija 2
U pravougaonom koordinatnom sistemu trodimenzionalnog prostora vektorski proizvod dva vektora a → = (a x ; a y ; a z) i b → = (b x ; b y ; b z) naziva se vektor c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , gdje su i → , j → , k → koordinatni vektori.
Vektorski proizvod se može predstaviti kao determinanta kvadratne matrice trećeg reda, gdje prvi red sadrži vektore i → , j → , k → , drugi red sadrži koordinate vektora a → , a treći red sadrži koordinate vektora b → u datom pravokutnom koordinatnom sistemu, ovo je determinanta matrice izgleda ovako: c → = a → × b → = i → j → k → a x a y a z b x b y b z
Proširujući ovu determinantu na elemente prvog reda, dobijamo jednakost: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z · i → - a x a z b x b z · j → + a x a y b x b y · k → = = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
Svojstva unakrsnog proizvoda
Poznato je da je vektorski proizvod u koordinatama predstavljen kao determinanta matrice c → = a → × b → = i → j → k → a x a y a z b x b y b z , a zatim na osnovu svojstva determinante matrice prikazano je sljedeće svojstva vektorskog proizvoda:
- antikomutativnost a → × b → = - b → × a → ;
- distributivnost a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → ili a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- asocijativnost λ a → × b → = λ a → × b → ili a → × (λ b →) = λ a → × b →, gdje je λ proizvoljan realan broj.
Ova svojstva imaju jednostavne dokaze.
Kao primjer, možemo dokazati antikomutativno svojstvo vektorskog proizvoda.
Dokaz antikomutativnosti
Po definiciji, a → × b → = i → j → k → a x a y a z b x b y b z i b → × a → = i → j → k → b x b y b z a x a y a z . A ako se dva reda matrice zamijene, tada bi se vrijednost determinante matrice trebala promijeniti u suprotno, dakle, a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , što i dokazuje da je vektorski proizvod antikomutativan.
Vektorski proizvod - primjeri i rješenja
U većini slučajeva postoje tri vrste problema.
U problemima prvog tipa obično su date dužine dva vektora i ugao između njih, a potrebno je pronaći dužinu vektorskog proizvoda. U ovom slučaju koristite sljedeću formulu c → = a → · b → · sin ∠ a → , b → .
Primjer 1
Pronađite dužinu vektorskog proizvoda vektora a → i b → ako znate a → = 3, b → = 5, ∠ a →, b → = π 4.
Rješenje
Određivanjem dužine vektorskog proizvoda vektora a → i b → rješavamo ovaj problem: a → × b → = a → · b → · sin ∠ a → , b → = 3 · 5 · sin π 4 = 15 2 2 .
odgovor: 15 2 2 .
Problemi drugog tipa imaju veze sa koordinatama vektora, u njima vektorski proizvod, njegova dužina itd. se pretražuju kroz poznate koordinate datih vektora a → = (a x; a y; a z) I b → = (b x ; b y ; b z) .
Za ovu vrstu problema možete riješiti mnogo opcija zadataka. Na primjer, ne mogu se specificirati koordinate vektora a → i b →, već njihova proširenja u koordinatne vektore oblika b → = b x · i → + b y · j → + b z · k → i c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →, ili vektori a → i b → mogu biti specificirani koordinatama njihovog početka i krajnje tačke.
Razmotrite sljedeće primjere.
Primjer 2
U pravougaonom koordinatnom sistemu data su dva vektora: a → = (2; 1; - 3), b → = (0; - 1; 1). Pronađite njihov unakrsni proizvod.
Rješenje
Prema drugoj definiciji, nalazimo vektorski proizvod dva vektora u datim koordinatama: a → × b → = (a y · b z - a z · b y) · i → + (a z · b x - a x · b z) · j → + ( a x · b y - a y · b x) · k → = = (1 · 1 - (- 3) · (- 1)) · i → + ((- 3) · 0 - 2 · 1) · j → + (2 · (- 1) - 1 · 0) · k → = = - 2 i → - 2 j → - 2 k → .
Ako vektorski proizvod zapišemo kroz determinantu matrice, tada rješenje ovog primjera izgleda ovako: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
odgovor: a → × b → = - 2 i → - 2 j → - 2 k → .
Primjer 3
Odrediti dužinu vektorskog proizvoda vektora i → - j → i i → + j → + k →, gdje su i →, j →, k → jedinični vektori pravokutnog Dekartovog koordinatnog sistema.
Rješenje
Prvo, pronađimo koordinate datog vektorskog proizvoda i → - j → × i → + j → + k → u datom pravokutnom koordinatnom sistemu.
Poznato je da vektori i → - j → i i → + j → + k → imaju koordinate (1; - 1; 0) i (1; 1; 1), respektivno. Nađimo dužinu vektorskog proizvoda koristeći determinantu matrice, tada imamo i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
Dakle, vektorski proizvod i → - j → × i → + j → + k → ima koordinate (- 1 ; - 1 ; 2) u datom koordinatnom sistemu.
Dužinu vektorskog proizvoda pronalazimo pomoću formule (pogledajte odjeljak o pronalaženju dužine vektora): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6.
odgovor: i → - j → × i → + j → + k → = 6 . .
Primjer 4
U pravougaonom Dekartovom koordinatnom sistemu date su koordinate tri tačke A (1, 0, 1), B (0, 2, 3), C (1, 4, 2). Nađite vektor okomit na A B → i A C → u isto vrijeme.
Rješenje
Vektori A B → i A C → imaju sljedeće koordinate (- 1 ; 2 ; 2) i (0 ; 4 ; 1) redom. Nakon što smo pronašli vektorski proizvod vektora A B → i A C →, očigledno je da je to okomit vektor po definiciji i na A B → i na A C →, odnosno da je rješenje našeg problema. Nađimo ga A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
odgovor: - 6 i → + j → - 4 k → . - jedan od okomitih vektora.
Problemi trećeg tipa fokusirani su na korištenje svojstava vektorskog proizvoda vektora. Nakon primjene koje, dobićemo rješenje zadatog problema.
Primjer 5
Vektori a → i b → su okomiti i njihove dužine su 3 i 4, respektivno. Pronađite dužinu vektorskog proizvoda 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → .
Rješenje
Prema distributivnom svojstvu vektorskog proizvoda, možemo napisati 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
Svojstvom asocijativnosti uzimamo numeričke koeficijente iz predznaka vektorskih proizvoda u posljednjem izrazu: 3 · a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → = = 3 · a → × a → + 3 · (- 2) · a → × b → + (- 1) · b → × a → + (- 1) · (- 2) · b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
Vektorski produkti a → × a → i b → × b → jednaki su 0, budući da su a → × a → = a → · a → · sin 0 = 0 i b → × b → = b → · b → · sin 0 = 0, zatim 3 · a → × a → - 6 · a → × b → - b → × a → + 2 · b → × b → = - 6 · a → × b → - b → × a → . .
Iz antikomutativnosti vektorskog proizvoda slijedi - 6 · a → × b → - b → × a → = - 6 · a → × b → - (- 1) · a → × b → = - 5 · a → × b → . .
Koristeći svojstva vektorskog proizvoda, dobijamo jednakost 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
Pod uslovom, vektori a → i b → su okomiti, odnosno ugao između njih je jednak π 2. Sada ostaje samo da se pronađene vrijednosti zamijene u odgovarajuće formule: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → · sin (a → , b →) = 5 · 3 · 4 · sin π 2 = 60 .
odgovor: 3 a → - b → × a → - 2 b → = 60.
Dužina vektorskog proizvoda vektora po definiciji je jednaka a → × b → = a → · b → · sin ∠ a → , b → . Pošto je već poznato (od školski kurs) da je površina trokuta jednaka polovini umnoška dužina njegovih dviju stranica pomnoženog sa sinusom ugla između ovih stranica. Prema tome, dužina vektorskog proizvoda jednaka je površini paralelograma - udvojenog trokuta, odnosno proizvodu stranica u obliku vektora a → i b →, položenih iz jedne tačke, sinusom od ugao između njih sin ∠ a →, b →.
Ovo je geometrijsko značenje vektorskog proizvoda.
Fizičko značenje vektorskog proizvoda
U mehanici, jednoj od grana fizike, zahvaljujući vektorskom proizvodu, možete odrediti moment sile u odnosu na tačku u prostoru.
Definicija 3
Pod momentom sile F → primijenjene na tačku B, u odnosu na tačku A, razumjet ćemo sljedeći vektorski proizvod A B → × F →.
Ako primijetite grešku u tekstu, označite je i pritisnite Ctrl+Enter
Jedinični vektor- Ovo vektor, apsolutna vrijednost(modul) od kojih je jednak jedan. Za označavanje jediničnog vektora koristićemo indeks e. Dakle, ako je dat vektor A, tada će njegov jedinični vektor biti vektor A e. Ovaj jedinični vektor je usmjeren u istom smjeru kao i sam vektor A, a njegov modul je jednak jedinici, odnosno a e = 1.
Očigledno, A= a A e (a - vektorski modul A). Ovo proizilazi iz pravila po kojem se izvodi operacija množenja skalara vektorom.
Jedinični vektoričesto povezan sa koordinatnim osa koordinatnog sistema (posebno, sa osovinama kartezijanskog koordinatnog sistema). Smjerovi ovih vektori poklapaju se sa pravcima odgovarajućih osa, a njihova početka se često kombinuju sa ishodištem koordinatnog sistema.
Dozvolite mi da vas podsjetim na to Dekartov koordinatni sistem u prostoru, tradicionalno se naziva trio međusobno okomitih osa koje se sijeku u tački koja se naziva ishodište koordinata. Koordinatne ose se obično označavaju slovima X, Y, Z i nazivaju se osa apscisa, ordinatna osa i aplikatna osa, respektivno. Sam Descartes je koristio samo jednu osu na kojoj su ucrtane apscise. Zasluge upotrebe sistemima sjekire pripadaju njegovim učenicima. Stoga fraza kartezijanski sistem koordinate istorijski pogrešno. Bolje je razgovarati pravougaona koordinatni sistem ili ortogonalni koordinatni sistem. Međutim, nećemo mijenjati tradicije i u budućnosti ćemo pretpostaviti da su kartezijanski i pravougaoni (ortogonalni) koordinatni sistemi jedno te isto.
Jedinični vektor, usmjeren duž ose X, označava se i, jedinični vektor, usmjeren duž ose Y, označen je j, A jedinični vektor, usmjeren duž ose Z, označen je k. Vektori i, j, k su pozvani orts(Sl. 12, lijevo), imaju pojedinačne module, tj
i = 1, j = 1, k = 1.
Axes and jedinični vektori pravougaoni koordinatni sistem u nekim slučajevima imaju različite nazive i oznake. Dakle, os apscise X može se nazvati tangentnom osom, a njen jedinični vektor je označen τ (grčko malo slovo tau), ordinatna os je normalna os, njen jedinični vektor je označen n, aplikativna osa je binormalna osa, njen jedinični vektor je označen b. Zašto mijenjati imena ako je suština ista?
Činjenica je da se, na primjer, u mehanici, kada se proučava kretanje tijela, vrlo često koristi pravokutni koordinatni sistem. Dakle, ako je sam koordinatni sistem stacionaran, a promjena koordinata pokretnog objekta se prati u ovom stacionarnom sistemu, tada se obično osi označavaju X, Y, Z, a njihove jedinični vektori respektivno i, j, k.
Ali često, kada se objekt kreće po nekoj vrsti krivolinijske putanje (na primjer, u krugu), prikladnije je razmotriti mehaničke procese u koordinatnom sistemu koji se kreće s ovim objektom. Za takav pokretni koordinatni sistem se koriste drugi nazivi osa i njihovih jediničnih vektora. To je jednostavno tako kako je. U ovom slučaju, X os je usmjerena tangencijalno na putanju u tački u kojoj ovog trenutka ovaj objekat se nalazi. I tada se ova os više ne zove X osa, već tangentna os, a njen jedinični vektor se više ne označava i, A τ . Y os je usmjerena duž radijusa zakrivljenosti putanje (u slučaju kretanja u krugu - do centra kruga). A pošto je poluprečnik okomit na tangentu, os se naziva normalna osa (okomica i normala su ista stvar). Jedinični vektor ove ose se više ne označava j, A n. Treća osa (ranije Z) je okomita na prethodne dvije. Ovo je binormalno sa ortom b(Sl. 12, desno). Inače, u ovom slučaju takva pravougaoni koordinatni sistemčesto nazivaju "prirodnim" ili prirodnim.
Definicija. Vektorski proizvod vektora a (množenik) i nekolinearnog vektora (množenik) je treći vektor c (proizvod), koji je konstruisan na sledeći način:
1) njegov modul je numerički jednak površini paralelograma na sl. 155), izgrađen na vektorima, odnosno jednak je pravcu okomitom na ravan navedenog paralelograma;
3) u ovom slučaju se bira pravac vektora c (od dva moguća) tako da vektori c formiraju desnoruki sistem (§ 110).
Oznaka: ili
Dodatak definiciji. Ako su vektori kolinearni, smatrajući da je figura (uslovno) paralelogram, prirodno je dodijeliti nultu površinu. Stoga se vektorski proizvod kolinearnih vektora smatra jednakim nultom vektoru.

Pošto se nultom vektoru može dodijeliti bilo koji smjer, ovaj sporazum nije u suprotnosti sa paragrafima 2 i 3 definicije.
Napomena 1. U terminu “vektorski proizvod” prva riječ označava da je rezultat akcije vektor (za razliku od skalarnog proizvoda; up. § 104, napomena 1).
Primjer 1. Pronađite vektorski proizvod gdje su glavni vektori desnog koordinatnog sistema (Sl. 156).
1. Pošto su dužine glavnih vektora jednake jednoj skali, površina paralelograma (kvadrata) je brojčano jednaka jedan. To znači da je modul vektorskog proizvoda jednak jedan.
2. Pošto je okomita na ravan os, željeni vektorski proizvod je vektor kolinearan vektoru k; a pošto oba imaju modul 1, željeni vektorski proizvod je jednak ili k ili -k.
3. Od ova dva moguća vektora, mora se izabrati prvi, pošto vektori k čine desnoruki sistem (a vektori levoruki).
Primjer 2. Pronađite unakrsni proizvod
Rješenje. Kao u primjeru 1, zaključujemo da je vektor jednak ili k ili -k. Ali sada treba da izaberemo -k, pošto vektori formiraju desnoruki sistem (a vektori čine levoruki). dakle,
Primjer 3. Vektori imaju dužine jednake 80 i 50 cm, respektivno, i formiraju ugao od 30°. Uzimajući metar kao jedinicu dužine, pronađite dužinu vektorskog proizvoda a

Rješenje. Površina paralelograma izgrađenog na vektorima je jednaka Dužina željenog vektorskog proizvoda jednaka je
Primjer 4. Odrediti dužinu vektorskog proizvoda istih vektora, uzimajući centimetre kao jedinicu dužine.
Rješenje. Pošto je površina paralelograma konstruisanog na vektorima jednaka, dužina vektorskog proizvoda je jednaka 2000 cm, tj.
Iz poređenja primjera 3 i 4 jasno je da dužina vektora ne zavisi samo od dužina faktora već i od izbora jedinice dužine.
Fizičko značenje vektorskog proizvoda. Od brojnih fizičkih veličina predstavljenih vektorskim proizvodom, razmotrit ćemo samo moment sile.
Neka je A tačka primene sile. Moment sile u odnosu na tačku O naziva se vektorski proizvod. Pošto je modul ovog vektorskog proizvoda brojčano jednak površini paralelograma (Sl. 157), onda modul momenta jednak je umnošku osnove i visine, tj. sili pomnoženoj sa rastojanjem od tačke O do prave linije duž koje sila deluje.
U mehanici je dokazano da za ravnotežu solidan Neophodno je da ne samo zbir vektora koji predstavljaju sile primijenjene na tijelo bude jednak nuli, već i zbir momenata sila. U slučaju kada su sve sile paralelne jednoj ravni, sabiranje vektora koji predstavljaju momente može se zamijeniti sabiranjem i oduzimanjem njihovih veličina. Ali sa proizvoljnim smjerovima sila, takva zamjena je nemoguća. U skladu s tim, vektorski proizvod je definiran upravo kao vektor, a ne kao broj.

7.1. Definicija unakrsnog proizvoda
Tri nekoplanarna vektora a, b i c, uzeta navedenim redoslijedom, formiraju desnoruki triplet ako se od kraja trećeg vektora c vidi najkraći zaokret od prvog vektora a do drugog vektora b do biti u smjeru suprotnom od kazaljke na satu, a ljevoruka trojka ako je u smjeru kazaljke na satu (vidi sliku . 16).
Vektorski proizvod vektora a i vektora b naziva se vektor c, koji:
1. Okomito na vektore a i b, tj. c ^ a i c ^ b ;
2. Ima dužinu numerički jednaku površini paralelograma konstruiranog na vektorima a ib kao na bočnim stranama (vidi sliku 17), tj.
3. Vektori a, b i c formiraju desnu trojku.


Unakrsni proizvod se označava a x b ili [a,b]. Sljedeće relacije između jediničnih vektora i direktno slijede iz definicije vektorskog proizvoda, j I k(vidi sliku 18):
i x j = k, j x k = i, k x i = j.
Dokažimo, na primjer, to i xj =k.
1) k ^ i, k ^ j ;
2) |k |=1, ali | i x j| = |i | |J | sin(90°)=1;
3) vektori i, j i k formiraju desnu trojku (vidi sliku 16).
7.2. Svojstva unakrsnog proizvoda
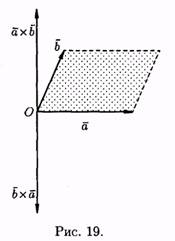
1. Prilikom preraspoređivanja faktora vektorski proizvod mijenja predznak, tj. i xb =(b xa) (vidi sliku 19).
Vektori a xb i b xa su kolinearni, imaju iste module (površina paralelograma ostaje nepromijenjena), ali su suprotno usmjereni (trojke a, b, a xb i a, b, b x a suprotne orijentacije). To je axb = -(b xa).
2. Vektorski proizvod ima svojstvo kombinovanja u odnosu na skalarni faktor, tj. l (a xb) = (l a) x b = a x (l b).
Neka je l >0. Vektor l (a xb) je okomit na vektore a i b. Vektor ( l sjekira b je također okomita na vektore a i b(vektori a, l ali leže u istoj ravni). To znači da su vektori l(a xb) i ( l sjekira b kolinearno. Očigledno je da im se pravci poklapaju. Imaju istu dužinu:
Zbog toga l(a xb)= l a xb. Dokazuje se na sličan način za l<0.
3. Dva različita od nule vektora a i b su kolinearni ako i samo ako je njihov vektorski proizvod jednak nultom vektoru, tj. a ||b<=>i xb =0.

Konkretno, i *i =j *j =k *k =0 .
4. Vektorski proizvod ima svojstvo distribucije:
(a+b) xc = a xc + b xs.
Prihvatićemo bez dokaza.
7.3. Izražavanje unakrsnog proizvoda u koordinatama
Koristićemo tablicu unakrsnog proizvoda vektora i, j i k:

ako se smjer najkraće putanje od prvog do drugog vektora poklapa sa smjerom strelice, tada je proizvod jednak trećem vektoru; ako se ne poklapa, treći vektor uzima se sa predznakom minus.
Neka su data dva vektora a =a x i +a y j+a z k i b =b x i+b y j+b z k. Nađimo vektorski proizvod ovih vektora množenjem ih kao polinome (prema svojstvima vektorskog proizvoda):

![]()
Rezultirajuća formula može se napisati još kraće:

budući da desna strana jednakosti (7.1) odgovara proširenju determinante trećeg reda u smislu elemenata prvog reda Jednakost (7.2) je lako zapamtiti.
7.4. Neke primjene unakrsnog proizvoda
Uspostavljanje kolinearnosti vektora

Pronalaženje površine paralelograma i trougla
Prema definiciji vektorskog proizvoda vektora A i b |a xb | =|a | * |b |sin g, tj. S parovi = |a x b |. I, prema tome, D S =1/2|a x b |.
Određivanje momenta sile oko tačke
Neka sila deluje u tački A F =AB pusti to O- neka tačka u prostoru (vidi sliku 20).

Iz fizike je poznato da moment sile F u odnosu na tačku O zove se vektor M, koji prolazi kroz tačku O i:
1) okomito na ravan koja prolazi kroz tačke O, A, B;
2) brojčano jednak proizvodu sile po kraku
3) formira desnu trojku sa vektorima OA i A B.
Dakle, M = OA x F.
Pronalaženje linearne brzine rotacije
Brzina v tačka M krutog tijela koje rotira ugaonom brzinom w oko fiksne ose, određena je Eulerovom formulom v =w xr, gdje je r =OM, gdje je O neka fiksna tačka ose (vidi sliku 21).
